mirror of
https://github.com/huggingface/trl.git
synced 2025-10-20 18:43:52 +08:00
🧘 Enhance markdown style (#4235)
This commit is contained in:
committed by
 GitHub
GitHub
parent
68ef15c686
commit
c38cb69ec7
148
CONTRIBUTING.md
148
CONTRIBUTING.md
@ -1,15 +1,10 @@
|
||||
# How to contribute to TRL?
|
||||
|
||||
Everyone is welcome to contribute, and we value everybody's contribution. Code
|
||||
contributions are not the only way to help the community. Answering questions, helping
|
||||
others, and improving the documentation are also immensely valuable.
|
||||
Everyone is welcome to contribute, and we value everybody's contribution. Code contributions are not the only way to help the community. Answering questions, helping others, and improving the documentation are also immensely valuable.
|
||||
|
||||
It also helps us if you spread the word! Reference the library in blog posts
|
||||
about the awesome projects it made possible, shout out on Twitter every time it has
|
||||
helped you, or simply ⭐️ the repository to say thank you.
|
||||
It also helps us if you spread the word! Reference the library in blog posts about the awesome projects it made possible, shout out on Twitter every time it has helped you, or simply ⭐️ the repository to say thank you.
|
||||
|
||||
However you choose to contribute, please be mindful and respect our
|
||||
[code of conduct](https://github.com/huggingface/trl/blob/main/CODE_OF_CONDUCT.md).
|
||||
However you choose to contribute, please be mindful and respect our [code of conduct](https://github.com/huggingface/trl/blob/main/CODE_OF_CONDUCT.md).
|
||||
|
||||
**This guide was heavily inspired by the awesome [scikit-learn guide to contributing](https://github.com/scikit-learn/scikit-learn/blob/main/CONTRIBUTING.md).**
|
||||
|
||||
@ -22,9 +17,7 @@ There are several ways you can contribute to TRL:
|
||||
* Implement trainers for new post-training algorithms.
|
||||
* Contribute to the examples or the documentation.
|
||||
|
||||
If you don't know where to start, there is a special [Good First
|
||||
Issue](https://github.com/huggingface/trl/labels/%F0%9F%91%B6%20good%20first%20issue) listing. It will give you a list of
|
||||
open issues that are beginner-friendly and help you start contributing to open-source. The best way to do that is to open a Pull Request and link it to the issue that you'd like to work on. We try to give priority to opened PRs as we can easily track the progress of the fix, and if the contributor does not have time anymore, someone else can take the PR over.
|
||||
If you don't know where to start, there is a special [Good First Issue](https://github.com/huggingface/trl/labels/%F0%9F%91%B6%20good%20first%20issue) listing. It will give you a list of open issues that are beginner-friendly and help you start contributing to open-source. The best way to do that is to open a Pull Request and link it to the issue that you'd like to work on. We try to give priority to opened PRs as we can easily track the progress of the fix, and if the contributor does not have time anymore, someone else can take the PR over.
|
||||
|
||||
For something slightly more challenging, you can also take a look at the [Good Second Issue](https://github.com/huggingface/trl/labels/Good%20Second%20Issue) list. In general though, if you feel like you know what you're doing, go for it and we'll help you get there! 🚀
|
||||
|
||||
@ -48,14 +41,12 @@ Do your best to follow these guidelines when submitting a bug-related issue or a
|
||||
|
||||
The TRL library is robust and reliable thanks to users who report the problems they encounter.
|
||||
|
||||
Before you report an issue, we would really appreciate it if you could **make sure the bug was not
|
||||
already reported** (use the search bar on GitHub under Issues). Your issue should also be related to bugs in the library itself, and not your code.
|
||||
Before you report an issue, we would really appreciate it if you could **make sure the bug was not already reported** (use the search bar on GitHub under Issues). Your issue should also be related to bugs in the library itself, and not your code.
|
||||
|
||||
Once you've confirmed the bug hasn't already been reported, please include the following information in your issue so we can quickly resolve it:
|
||||
|
||||
* Your **OS type and version**, **Python**, **PyTorch**, **TRL** and **Transformers** versions.
|
||||
* A short, self-contained, code snippet that allows us to reproduce the bug in
|
||||
less than 30s.
|
||||
* A short, self-contained, code snippet that allows us to reproduce the bug in less than 30s.
|
||||
* The *full* traceback if an exception is raised.
|
||||
* Attach any other additional information, like screenshots, you think may help.
|
||||
|
||||
@ -106,29 +97,20 @@ We're always looking for improvements to the documentation that make it more cle
|
||||
|
||||
## Submitting a pull request (PR)
|
||||
|
||||
Before writing code, we strongly advise you to search through the existing PRs or
|
||||
issues to make sure that nobody is already working on the same thing. If you are
|
||||
unsure, it is always a good idea to open an issue to get some feedback.
|
||||
Before writing code, we strongly advise you to search through the existing PRs or issues to make sure that nobody is already working on the same thing. If you are unsure, it is always a good idea to open an issue to get some feedback.
|
||||
|
||||
You will need basic `git` proficiency to be able to contribute to
|
||||
TRL. `git` is not the easiest tool to use but it has the greatest
|
||||
manual. Type `git --help` in a shell and enjoy. If you prefer books, [Pro
|
||||
Git](https://git-scm.com/book/en/v2) is a very good reference.
|
||||
You will need basic `git` proficiency to be able to contribute to TRL. `git` is not the easiest tool to use but it has the greatest manual. Type `git --help` in a shell and enjoy. If you prefer books, [Pro Git](https://git-scm.com/book/en/v2) is a very good reference.
|
||||
|
||||
Follow these steps to start contributing:
|
||||
|
||||
1. Fork the [repository](https://github.com/huggingface/trl) by
|
||||
clicking on the 'Fork' button on the repository's page. This creates a copy of the code
|
||||
under your GitHub user account.
|
||||
1. Fork the [repository](https://github.com/huggingface/trl) by clicking on the 'Fork' button on the repository's page. This creates a copy of the code under your GitHub user account.
|
||||
|
||||
2. Clone your fork to your local disk, and add the base repository as a remote. The following command
|
||||
assumes you have your public SSH key uploaded to GitHub. See the following guide for more
|
||||
[information](https://docs.github.com/en/repositories/creating-and-managing-repositories/cloning-a-repository).
|
||||
2. Clone your fork to your local disk, and add the base repository as a remote. The following command assumes you have your public SSH key uploaded to GitHub. See the following guide for more [information](https://docs.github.com/en/repositories/creating-and-managing-repositories/cloning-a-repository).
|
||||
|
||||
```bash
|
||||
$ git clone git@github.com:<your Github handle>/trl.git
|
||||
$ cd trl
|
||||
$ git remote add upstream https://github.com/huggingface/trl.git
|
||||
git clone git@github.com:<your Github handle>/trl.git
|
||||
cd trl
|
||||
git remote add upstream https://github.com/huggingface/trl.git
|
||||
```
|
||||
|
||||
3. Create a new branch to hold your development changes, and do this for every new PR you work on.
|
||||
@ -136,15 +118,15 @@ Follow these steps to start contributing:
|
||||
Start by synchronizing your `main` branch with the `upstream/main` branch (more details in the [GitHub Docs](https://docs.github.com/en/github/collaborating-with-issues-and-pull-requests/syncing-a-fork)):
|
||||
|
||||
```bash
|
||||
$ git checkout main
|
||||
$ git fetch upstream
|
||||
$ git merge upstream/main
|
||||
git checkout main
|
||||
git fetch upstream
|
||||
git merge upstream/main
|
||||
```
|
||||
|
||||
Once your `main` branch is synchronized, create a new branch from it:
|
||||
|
||||
```bash
|
||||
$ git checkout -b a-descriptive-name-for-my-changes
|
||||
git checkout -b a-descriptive-name-for-my-changes
|
||||
```
|
||||
|
||||
**Do not** work on the `main` branch.
|
||||
@ -152,23 +134,19 @@ Follow these steps to start contributing:
|
||||
4. Set up a development environment by running the following command in a conda or a virtual environment you've created for working on this library:
|
||||
|
||||
```bash
|
||||
$ pip install -e .[dev]
|
||||
pip install -e .[dev]
|
||||
```
|
||||
|
||||
(If TRL was already installed in the virtual environment, remove
|
||||
it with `pip uninstall trl` before reinstalling it.)
|
||||
(If TRL was already installed in the virtual environment, remove it with `pip uninstall trl` before reinstalling it.)
|
||||
|
||||
Alternatively, if you are using [Visual Studio Code](https://code.visualstudio.com/Download), the fastest way to get set up is by using
|
||||
the provided Dev Container. Documentation on how to get started with dev containers is available [here](https://code.visualstudio.com/docs/remote/containers).
|
||||
Alternatively, if you are using [Visual Studio Code](https://code.visualstudio.com/Download), the fastest way to get set up is by using the provided Dev Container. Check [the documentation on how to get started with dev containers](https://code.visualstudio.com/docs/remote/containers).
|
||||
|
||||
5. Develop the features on your branch.
|
||||
|
||||
As you work on the features, you should make sure that the test suite
|
||||
passes. You should run the tests impacted by your changes like this (see
|
||||
below an explanation regarding the environment variable):
|
||||
As you work on the features, you should make sure that the test suite passes. You should run the tests impacted by your changes like this (see below an explanation regarding the environment variable):
|
||||
|
||||
```bash
|
||||
$ pytest tests/<TEST_TO_RUN>.py
|
||||
pytest tests/<TEST_TO_RUN>.py
|
||||
```
|
||||
|
||||
> For the following commands leveraging the `make` utility.
|
||||
@ -176,7 +154,7 @@ Follow these steps to start contributing:
|
||||
You can also run the full suite with the following command.
|
||||
|
||||
```bash
|
||||
$ make test
|
||||
make test
|
||||
```
|
||||
|
||||
TRL relies on `ruff` for maintaining consistent code formatting across its source files. Before submitting any PR, you should apply automatic style corrections and run code verification checks.
|
||||
@ -186,21 +164,21 @@ Follow these steps to start contributing:
|
||||
To apply these checks and corrections in one step, use:
|
||||
|
||||
```bash
|
||||
$ make precommit
|
||||
make precommit
|
||||
```
|
||||
|
||||
This command runs the following:
|
||||
- Executes `pre-commit` hooks to automatically fix style issues with `ruff` and other tools.
|
||||
- Runs additional scripts such as adding copyright information.
|
||||
|
||||
* Executes `pre-commit` hooks to automatically fix style issues with `ruff` and other tools.
|
||||
* Runs additional scripts such as adding copyright information.
|
||||
|
||||
If you prefer to apply the style corrections separately or review them individually, the `pre-commit` hook will handle the formatting for the files in question.
|
||||
|
||||
Once you're happy with your changes, add changed files using `git add` and
|
||||
make a commit with `git commit` to record your changes locally:
|
||||
Once you're happy with your changes, add changed files using `git add` and make a commit with `git commit` to record your changes locally:
|
||||
|
||||
```bash
|
||||
$ git add modified_file.py
|
||||
$ git commit
|
||||
git add modified_file.py
|
||||
git commit
|
||||
```
|
||||
|
||||
Please write [good commit messages](https://chris.beams.io/posts/git-commit/).
|
||||
@ -209,36 +187,28 @@ Follow these steps to start contributing:
|
||||
repository regularly. This way you can quickly account for changes:
|
||||
|
||||
```bash
|
||||
$ git fetch upstream
|
||||
$ git rebase upstream/main
|
||||
git fetch upstream
|
||||
git rebase upstream/main
|
||||
```
|
||||
|
||||
Push the changes to your account using:
|
||||
|
||||
```bash
|
||||
$ git push -u origin a-descriptive-name-for-my-changes
|
||||
git push -u origin a-descriptive-name-for-my-changes
|
||||
```
|
||||
|
||||
6. Once you are satisfied (**and the checklist below is happy too**), go to the
|
||||
webpage of your fork on GitHub. Click on 'Pull request' to send your changes
|
||||
to the project maintainers for review.
|
||||
6. Once you are satisfied (**and the checklist below is happy too**), go to the webpage of your fork on GitHub. Click on 'Pull request' to send your changes to the project maintainers for review.
|
||||
|
||||
7. It's ok if maintainers ask you for changes. It happens to core contributors too! To ensure everyone can review your changes in the pull request, work on your local branch and push the updates to your fork. They will automatically appear in the pull request.
|
||||
|
||||
|
||||
### Checklist
|
||||
|
||||
1. The title of your pull request should be a summary of its contribution;
|
||||
2. If your pull request addresses an issue, please mention the issue number in
|
||||
the pull request description to make sure they are linked (and people
|
||||
consulting the issue know you are working on it);
|
||||
3. To indicate a work in progress please prefix the title with `[WIP]`, or mark
|
||||
the PR as a draft PR. These are useful to avoid duplicated work, and to differentiate
|
||||
it from PRs ready to be merged;
|
||||
2. If your pull request addresses an issue, please mention the issue number in the pull request description to make sure they are linked (and people consulting the issue know you are working on it);
|
||||
3. To indicate a work in progress please prefix the title with `[WIP]`, or mark the PR as a draft PR. These are useful to avoid duplicated work, and to differentiate it from PRs ready to be merged;
|
||||
4. Make sure existing tests pass;
|
||||
5. Add high-coverage tests. No quality testing = no merge.
|
||||
|
||||
|
||||
### Tests
|
||||
|
||||
An extensive test suite is included to test the library behavior and several examples. Library tests can be found in
|
||||
@ -248,7 +218,7 @@ We use `pytest` to run the tests. From the root of the
|
||||
repository here's how to run tests with `pytest` for the library:
|
||||
|
||||
```bash
|
||||
$ python -m pytest -sv ./tests
|
||||
python -m pytest -sv ./tests
|
||||
```
|
||||
|
||||
That's how `make test` is implemented (without the `pip install` line)!
|
||||
@ -260,23 +230,23 @@ you're working on.
|
||||
|
||||
1. **Use defaults when appropriate**:
|
||||
|
||||
Provide default values unless the parameter's value varies significantly by use case. For example, datasets or models should not have defaults, but parameters like `learning_rate` should.
|
||||
Provide default values unless the parameter's value varies significantly by use case. For example, datasets or models should not have defaults, but parameters like `learning_rate` should.
|
||||
|
||||
2. **Prioritize proven defaults**:
|
||||
|
||||
Default values should align with those recommended in the original paper or method. Alternatives require strong evidence of superior performance in most cases.
|
||||
Default values should align with those recommended in the original paper or method. Alternatives require strong evidence of superior performance in most cases.
|
||||
|
||||
3. **Ensure safety and predictability**:
|
||||
|
||||
Defaults must be safe, expected and reliable. Avoid settings that could lead to surprising outcomes, such as excessive memory usage or poor performance in edge cases.
|
||||
Defaults must be safe, expected and reliable. Avoid settings that could lead to surprising outcomes, such as excessive memory usage or poor performance in edge cases.
|
||||
|
||||
4. **Balance consistency and flexibility**:
|
||||
|
||||
Aim for consistent defaults across similar functions or methods. However, consistency should not be preferred to point 2 or 3.
|
||||
Aim for consistent defaults across similar functions or methods. However, consistency should not be preferred to point 2 or 3.
|
||||
|
||||
5. **Opt-in for new features**:
|
||||
|
||||
Do not enable new features or improvements (e.g., novel loss functions) by default. Users should explicitly opt-in to use these.
|
||||
Do not enable new features or improvements (e.g., novel loss functions) by default. Users should explicitly opt-in to use these.
|
||||
|
||||
### Writing documentation
|
||||
|
||||
@ -318,26 +288,26 @@ def replicate_str(string: str, n: int, sep: str = " ") -> str:
|
||||
* Note that `Optional` means that the value can be `None`, and `*optional*` means that it is not required for the user to pass a value.
|
||||
E.g., for arguments that can't be `None` and aren't required:
|
||||
|
||||
```python
|
||||
```txt
|
||||
foo (`int`, *optional*, defaults to `4`):
|
||||
```
|
||||
|
||||
For arguments that can be `None` and are required:
|
||||
|
||||
```python
|
||||
```txt
|
||||
foo (`Optional[int]`):
|
||||
```
|
||||
|
||||
for arguments that can be `None` and aren't required:
|
||||
for arguments that can be `None` and aren't required (in this case, if the default value is `None`, you can omit it):
|
||||
|
||||
```python
|
||||
```txt
|
||||
foo (`Optional[int]`, *optional*):
|
||||
```
|
||||
|
||||
* **String Defaults:**
|
||||
* Ensured that default string values are wrapped in double quotes:
|
||||
|
||||
```python
|
||||
```txt
|
||||
defaults to `"foo"`
|
||||
```
|
||||
|
||||
@ -346,7 +316,7 @@ def replicate_str(string: str, n: int, sep: str = " ") -> str:
|
||||
* **Default Value Formatting:**
|
||||
* Consistently surrounded default values with backticks for improved formatting:
|
||||
|
||||
```python
|
||||
```txt
|
||||
defaults to `4`
|
||||
```
|
||||
|
||||
@ -383,8 +353,8 @@ Our approach to deprecation and backward compatibility is flexible and based on
|
||||
|
||||
When a feature or component is marked for deprecation, its use will emit a warning message. This warning will include:
|
||||
|
||||
- **Transition Guidance**: Instructions on how to migrate to the alternative solution or replacement.
|
||||
- **Removal Version**: The target version when the feature will be removed, providing users with a clear timeframe to transition.
|
||||
* **Transition Guidance**: Instructions on how to migrate to the alternative solution or replacement.
|
||||
* **Removal Version**: The target version when the feature will be removed, providing users with a clear timeframe to transition.
|
||||
|
||||
Example:
|
||||
|
||||
@ -398,9 +368,9 @@ Example:
|
||||
|
||||
The deprecation and removal schedule is based on each feature's usage and impact, with examples at two extremes:
|
||||
|
||||
- **Experimental or Low-Use Features**: For a feature that is experimental or has limited usage, backward compatibility may not be maintained between releases. Users should therefore anticipate potential breaking changes from one version to the next.
|
||||
* **Experimental or Low-Use Features**: For a feature that is experimental or has limited usage, backward compatibility may not be maintained between releases. Users should therefore anticipate potential breaking changes from one version to the next.
|
||||
|
||||
- **Widely-Used Components**: For a feature with high usage, we aim for a more gradual transition period of approximately **5 months**, generally scheduling deprecation around **5 minor releases** after the initial warning.
|
||||
* **Widely-Used Components**: For a feature with high usage, we aim for a more gradual transition period of approximately **5 months**, generally scheduling deprecation around **5 minor releases** after the initial warning.
|
||||
|
||||
These examples represent the two ends of a continuum. The specific timeline for each feature will be determined individually, balancing innovation with user stability needs.
|
||||
|
||||
@ -410,22 +380,22 @@ Warnings play a critical role in guiding users toward resolving potential issues
|
||||
|
||||
#### Definitions
|
||||
|
||||
- **Correct**: An operation is correct if it is valid, follows the intended approach, and aligns with the current best practices or guidelines within the codebase. This is the recommended or intended way to perform the operation.
|
||||
- **Supported**: An operation is supported if it is technically valid and works within the current codebase, but it may not be the most efficient, optimal, or recommended way to perform the task. This includes deprecated features or legacy approaches that still work but may be phased out in the future.
|
||||
* **Correct**: An operation is correct if it is valid, follows the intended approach, and aligns with the current best practices or guidelines within the codebase. This is the recommended or intended way to perform the operation.
|
||||
* **Supported**: An operation is supported if it is technically valid and works within the current codebase, but it may not be the most efficient, optimal, or recommended way to perform the task. This includes deprecated features or legacy approaches that still work but may be phased out in the future.
|
||||
|
||||
#### Choosing the right message
|
||||
|
||||
- **Correct → No warning**:
|
||||
* **Correct → No warning**:
|
||||
If the operation is fully valid and expected, no message should be issued. The system is working as intended, so no warning is necessary.
|
||||
|
||||
- **Correct but deserves attention → No warning, possibly a log message**:
|
||||
* **Correct but deserves attention → No warning, possibly a log message**:
|
||||
When an operation is correct but uncommon or requires special attention, providing an informational message can be helpful. This keeps users informed without implying any issue. If available, use the logger to output this message. Example:
|
||||
|
||||
```python
|
||||
logger.info("This is an informational message about a rare but correct operation.")
|
||||
```
|
||||
|
||||
- **Correct but very likely a mistake → Warning with option to disable**:
|
||||
* **Correct but very likely a mistake → Warning with option to disable**:
|
||||
In rare cases, you may want to issue a warning for a correct operation that’s very likely a mistake. In such cases, you must provide an option to suppress the warning. This can be done with a flag in the function. Example:
|
||||
|
||||
```python
|
||||
@ -436,7 +406,7 @@ Warnings play a critical role in guiding users toward resolving potential issues
|
||||
# Do something
|
||||
```
|
||||
|
||||
- **Supported but not correct → Warning**:
|
||||
* **Supported but not correct → Warning**:
|
||||
If the operation is technically supported but is deprecated, suboptimal, or could cause future issues (e.g., conflicting arguments), a warning should be raised. This message should be actionable, meaning it must explain how to resolve the issue. Example:
|
||||
|
||||
```python
|
||||
@ -446,7 +416,7 @@ Warnings play a critical role in guiding users toward resolving potential issues
|
||||
# Do something
|
||||
```
|
||||
|
||||
- **Not supported → Exception**:
|
||||
* **Not supported → Exception**:
|
||||
If the operation is invalid or unsupported, raise an exception. This indicates that the operation cannot be performed and requires immediate attention. Example:
|
||||
|
||||
```python
|
||||
|
||||
@ -1,6 +1,6 @@
|
||||
# BCO Trainer
|
||||
|
||||
[](https://huggingface.co/models?other=bco,trl)
|
||||
[](https://huggingface.co/models?other=bco,trl)
|
||||
|
||||
TRL supports the Binary Classifier Optimization (BCO).
|
||||
The [BCO](https://huggingface.co/papers/2404.04656) authors train a binary classifier whose logit serves as a reward so that the classifier maps {prompt, chosen completion} pairs to 1 and {prompt, rejected completion} pairs to 0.
|
||||
@ -12,6 +12,7 @@ The [`BCOTrainer`] requires an [unpaired preference dataset](dataset_formats#unp
|
||||
The [`BCOTrainer`] supports both [conversational](dataset_formats#conversational) and [standard](dataset_formats#standard) dataset formats. When provided with a conversational dataset, the trainer will automatically apply the chat template to the dataset.
|
||||
|
||||
## Expected model format
|
||||
|
||||
The BCO trainer expects a model of `AutoModelForCausalLM`, compared to PPO that expects `AutoModelForCausalLMWithValueHead` for the value function.
|
||||
|
||||
## Using the `BCOTrainer`
|
||||
@ -20,9 +21,7 @@ For a detailed example have a look at the `examples/scripts/bco.py` script. At a
|
||||
|
||||
The `beta` refers to the hyperparameter of the implicit reward, and the dataset contains the 3 entries listed above. Note that the `model` and `ref_model` need to have the same architecture (ie decoder only or encoder-decoder).
|
||||
|
||||
|
||||
|
||||
```py
|
||||
```python
|
||||
training_args = BCOConfig(
|
||||
beta=0.1,
|
||||
)
|
||||
@ -35,9 +34,10 @@ bco_trainer = BCOTrainer(
|
||||
processing_class=tokenizer,
|
||||
)
|
||||
```
|
||||
|
||||
After this one can then call:
|
||||
|
||||
```py
|
||||
```python
|
||||
bco_trainer.train()
|
||||
```
|
||||
|
||||
@ -49,7 +49,7 @@ If the prompts in your desired and undesired datasets differ a lot, it is useful
|
||||
|
||||
Choose an embedding model and tokenizer:
|
||||
|
||||
```py
|
||||
```python
|
||||
embedding_model = AutoModel.from_pretrained(your_model_id)
|
||||
embedding_tokenizer = AutoTokenizer.from_pretrained(your_model_id)
|
||||
|
||||
@ -64,7 +64,7 @@ embedding_func = partial(embed_prompt, model=embedding_model)
|
||||
|
||||
Set `prompt_sample_size` to define how many prompts are selected to train the UDM classifier and start the training with the provided embedding function:
|
||||
|
||||
```py
|
||||
```python
|
||||
training_args = BCOConfig(
|
||||
beta=0.1,
|
||||
prompt_sample_size=512,
|
||||
|
||||
@ -8,7 +8,6 @@ As to how it fares against the RL based fine-tuning, please look in the `example
|
||||
To get started quickly, instantiate an instance of the class with a model, a length sampler, a tokenizer and a callable that serves as a proxy reward pipeline that outputs reward scores for input queries
|
||||
|
||||
```python
|
||||
|
||||
from transformers import pipeline, AutoTokenizer
|
||||
from trl import AutoModelForCausalLMWithValueHead
|
||||
from trl.core import LengthSampler
|
||||
@ -19,37 +18,29 @@ reward_pipe = pipeline("sentiment-analysis", model=reward_model, device=device)
|
||||
tokenizer = AutoTokenizer.from_pretrained(ref_model_name)
|
||||
tokenizer.pad_token = tokenizer.eos_token
|
||||
|
||||
|
||||
# callable that takes a list of raw text and returns a list of corresponding reward scores
|
||||
def queries_to_scores(list_of_strings):
|
||||
return [output["score"] for output in reward_pipe(list_of_strings)]
|
||||
|
||||
best_of_n = BestOfNSampler(model, tokenizer, queries_to_scores, length_sampler=output_length_sampler)
|
||||
|
||||
|
||||
```
|
||||
|
||||
And assuming you have a list/tensor of tokenized queries, you can generate better output by calling the `generate` method
|
||||
|
||||
```python
|
||||
|
||||
best_of_n.generate(query_tensors, device=device, **gen_kwargs)
|
||||
|
||||
```
|
||||
|
||||
The default sample size is 4, but you can change it at the time of instance initialization like so
|
||||
|
||||
```python
|
||||
|
||||
best_of_n = BestOfNSampler(model, tokenizer, queries_to_scores, length_sampler=output_length_sampler, sample_size=8)
|
||||
|
||||
```
|
||||
|
||||
The default output is the result of taking the top scored output for each query, but you can change it to top 2 and so on by passing the `n_candidates` argument at the time of instance initialization
|
||||
|
||||
```python
|
||||
|
||||
best_of_n = BestOfNSampler(model, tokenizer, queries_to_scores, length_sampler=output_length_sampler, n_candidates=2)
|
||||
|
||||
```
|
||||
|
||||
There is the option of setting the generation settings (like `temperature`, `pad_token_id`) at the time of instance creation as opposed to when calling the `generate` method.
|
||||
|
||||
@ -2,9 +2,11 @@
|
||||
|
||||
TRL provides a powerful command-line interface (CLI) to fine-tune large language models (LLMs) using methods like Supervised Fine-Tuning (SFT), Direct Preference Optimization (DPO), and more. The CLI abstracts away much of the boilerplate, letting you launch training jobs quickly and reproducibly.
|
||||
|
||||
## Commands
|
||||
|
||||
Currently supported commands are:
|
||||
|
||||
#### Training Commands
|
||||
### Training Commands
|
||||
|
||||
- `trl dpo`: fine-tune a LLM with DPO
|
||||
- `trl grpo`: fine-tune a LLM with GRPO
|
||||
@ -13,7 +15,7 @@ Currently supported commands are:
|
||||
- `trl rloo`: fine-tune a LLM with RLOO
|
||||
- `trl sft`: fine-tune a LLM with SFT
|
||||
|
||||
#### Other Commands
|
||||
### Other Commands
|
||||
|
||||
- `trl env`: get the system information
|
||||
- `trl vllm-serve`: serve a model with vLLM
|
||||
@ -197,15 +199,15 @@ trl reward --config reward_config.yaml
|
||||
|
||||
The `--accelerate_config` flag lets you easily configure distributed training with [🤗 Accelerate](https://github.com/huggingface/accelerate). This flag accepts either:
|
||||
|
||||
* the name of a predefined config profile (built into TRL), or
|
||||
* a path to a custom Accelerate YAML config file.
|
||||
- the name of a predefined config profile (built into TRL), or
|
||||
- a path to a custom Accelerate YAML config file.
|
||||
|
||||
#### Predefined Config Profiles
|
||||
|
||||
TRL provides several ready-to-use Accelerate configs to simplify common training setups:
|
||||
|
||||
| Name | Description |
|
||||
| ------------ | ----------------------------------- |
|
||||
| --- | --- |
|
||||
| `fsdp1` | Fully Sharded Data Parallel Stage 1 |
|
||||
| `fsdp2` | Fully Sharded Data Parallel Stage 2 |
|
||||
| `zero1` | DeepSpeed ZeRO Stage 1 |
|
||||
|
||||
@ -18,7 +18,6 @@ Community tutorials are made by active members of the Hugging Face community who
|
||||
| Preference Optimization | [`ORPOTrainer`] | Fine-tuning Llama 3 with ORPO combining instruction tuning and preference alignment | [Maxime Labonne](https://huggingface.co/mlabonne) | [Link](https://mlabonne.github.io/blog/posts/2024-04-19_Fine_tune_Llama_3_with_ORPO.html) | [](https://colab.research.google.com/drive/1eHNWg9gnaXErdAa8_mcvjMupbSS6rDvi) |
|
||||
| Instruction tuning | [`SFTTrainer`] | How to fine-tune open LLMs in 2025 with Hugging Face | [Philipp Schmid](https://huggingface.co/philschmid) | [Link](https://www.philschmid.de/fine-tune-llms-in-2025) | [](https://colab.research.google.com/github/philschmid/deep-learning-pytorch-huggingface/blob/main/training/fine-tune-llms-in-2025.ipynb) |
|
||||
|
||||
|
||||
### Videos
|
||||
|
||||
| Task | Title | Author | Video |
|
||||
@ -32,6 +31,7 @@ Community tutorials are made by active members of the Hugging Face community who
|
||||
|
||||
> [!WARNING]
|
||||
> The tutorial uses two deprecated features:
|
||||
>
|
||||
> - `SFTTrainer(..., tokenizer=tokenizer)`: Use `SFTTrainer(..., processing_class=tokenizer)` instead, or simply omit it (it will be inferred from the model).
|
||||
> - `setup_chat_format(model, tokenizer)`: Use `SFTConfig(..., chat_template_path="Qwen/Qwen3-0.6B")`, where `chat_template_path` specifies the model whose chat template you want to copy.
|
||||
|
||||
|
||||
@ -1,6 +1,6 @@
|
||||
# CPO Trainer
|
||||
|
||||
[](https://huggingface.co/models?other=cpo,trl)
|
||||
[](https://huggingface.co/models?other=cpo,trl)
|
||||
|
||||
## Overview
|
||||
|
||||
@ -99,15 +99,13 @@ To use this loss as described in the paper, we can set the `loss_type="alphapo"`
|
||||
The CPO algorithm supports several loss functions. The loss function can be set using the `loss_type` parameter in the [`CPOConfig`]. The following loss functions are supported:
|
||||
|
||||
| `loss_type=` | Description |
|
||||
| -------------------------------------- | ---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
|
||||
| --- | --- |
|
||||
| `"sigmoid"` (default) | Given the preference data, we can fit a binary classifier according to the Bradley-Terry model, and in fact, the [DPO](https://huggingface.co/papers/2305.18290) authors propose the sigmoid loss on the normalized likelihood via the `logsigmoid` to fit a logistic regression. |
|
||||
| `"hinge"` | The [RSO](https://huggingface.co/papers/2309.06657) authors propose to use a hinge loss on the normalized likelihood from the [SLiC](https://huggingface.co/papers/2305.10425) paper. In this case, the `beta` is the reciprocal of the margin. |
|
||||
| `"ipo"` | The [IPO](https://huggingface.co/papers/2310.12036) authors provide a deeper theoretical understanding of the DPO algorithms and identify an issue with overfitting and propose an alternative loss. In this case, the `beta` is the reciprocal of the gap between the log-likelihood ratios of the chosen vs the rejected completion pair, and thus the smaller the `beta`, the larger this gap is. As per the paper, the loss is averaged over log-likelihoods of the completion (unlike DPO, which is summed only). |
|
||||
| `"simpo"` | The [SimPO](https://huggingface.co/papers/2405.14734) method is also implemented in the [`CPOTrainer`]. SimPO is an alternative loss that adds a reward margin, allows for length normalization, and does not use BC regularization. To use this loss, simply set `loss_type="simpo"` and `cpo_alpha=0.0` in the [`CPOConfig`] and `simpo_gamma` to a recommended value. |
|
||||
| `"alphapo"` | The [AlphaPO](https://huggingface.co/papers/2501.03884) method is also implemented in the [`CPOTrainer`]. This is syntactic sugar that automatically sets `loss_type="simpo"` and `cpo_alpha=0.0`. AlphaPO applies a transformation to the reward function shape in the context of SimPO loss when the `alpha` parameter is non-zero. |
|
||||
|
||||
|
||||
|
||||
### For Mixture of Experts Models: Enabling the auxiliary loss
|
||||
|
||||
MOEs are the most efficient if the load is about equally distributed between experts.
|
||||
|
||||
@ -2,8 +2,6 @@
|
||||
|
||||
TRL is designed with modularity in mind so that users are able to efficiently customize the training loop for their needs. Below are some examples on how you can apply and test different techniques. Note: Although these examples use the DPOTrainer, the customization applies to most (if not all) trainers.
|
||||
|
||||
|
||||
|
||||
## Use different optimizers and schedulers
|
||||
|
||||
By default, the `DPOTrainer` creates a `torch.optim.AdamW` optimizer. You can create and define a different optimizer and pass it to `DPOTrainer` as follows:
|
||||
@ -88,7 +86,7 @@ trainer.train()
|
||||
|
||||
Since `trl` supports all keyword arguments when loading a model from `transformers` using `from_pretrained`, you can also leverage `load_in_8bit` from `transformers` for more memory efficient fine-tuning.
|
||||
|
||||
Read more about 8-bit model loading in `transformers` [here](https://huggingface.co/docs/transformers/en/peft#load-in-8bit-or-4bit).
|
||||
Read more about 8-bit model loading in `transformers` [Load in 8bit or 4bit](https://huggingface.co/docs/transformers/en/peft#load-in-8bit-or-4bit).
|
||||
|
||||
```python
|
||||
from datasets import load_dataset
|
||||
|
||||
@ -388,7 +388,7 @@ For examples of stepwise supervision datasets, refer to the [Stepwise supervisio
|
||||
Choosing the right dataset type depends on the task you are working on and the specific requirements of the TRL trainer you are using. Below is a brief overview of the dataset types supported by each TRL trainer.
|
||||
|
||||
| Trainer | Expected dataset type |
|
||||
| ----------------------- | ------------------------------------------------------------------------------------------------------ |
|
||||
| --- | --- |
|
||||
| [`BCOTrainer`] | [Unpaired preference](#unpaired-preference) or [Preference (explicit prompt recommended)](#preference) |
|
||||
| [`CPOTrainer`] | [Preference (explicit prompt recommended)](#preference) |
|
||||
| [`DPOTrainer`] | [Preference (explicit prompt recommended)](#preference) |
|
||||
@ -416,7 +416,7 @@ Fortunately, TRL offers tools to easily handle this conversion, which are detail
|
||||
|
||||
### Converting a conversational dataset into a standard dataset
|
||||
|
||||
To convert a conversational dataset into a standard dataset, you need to _apply a chat template_ to the dataset. A chat template is a predefined structure that typically includes placeholders for user and assistant messages. This template is provided by the tokenizer of the model you use.
|
||||
To convert a conversational dataset into a standard dataset, you need to *apply a chat template* to the dataset. A chat template is a predefined structure that typically includes placeholders for user and assistant messages. This template is provided by the tokenizer of the model you use.
|
||||
|
||||
For detailed instructions on using chat templating, refer to the [Chat templating section in the `transformers` documentation](https://huggingface.co/docs/transformers/en/chat_templating).
|
||||
|
||||
@ -520,7 +520,7 @@ This section provides example code to help you convert between different dataset
|
||||
For simplicity, some of the examples below do not follow this recommendation and use the standard format. However, the conversions can be applied directly to the conversational format without modification.
|
||||
|
||||
| From \ To | Language modeling | Prompt-completion | Prompt-only | Preference with implicit prompt | Preference | Unpaired preference | Stepwise supervision |
|
||||
| ------------------------------- | ----------------------------------------------------------------------- | ----------------------------------------------------------------------- | ----------------------------------------------------------------- | --------------------------------------------------------- | --------------------------------------------------------- | ------------------------------------------------------------------------- | -------------------- |
|
||||
| --- | --- | --- | --- | --- | --- | --- | --- |
|
||||
| Language modeling | N/A | N/A | N/A | N/A | N/A | N/A | N/A |
|
||||
| Prompt-completion | [🔗](#from-prompt-completion-to-language-modeling-dataset) | N/A | [🔗](#from-prompt-completion-to-prompt-only-dataset) | N/A | N/A | N/A | N/A |
|
||||
| Prompt-only | N/A | N/A | N/A | N/A | N/A | N/A | N/A |
|
||||
|
||||
@ -7,7 +7,7 @@ Read this section to follow our investigation on how we can reduce toxicity in a
|
||||
Here's an overview of the notebooks and scripts in the [TRL toxicity repository](https://github.com/huggingface/trl/tree/main/examples/toxicity/scripts) as well as the link for the interactive demo:
|
||||
|
||||
| File | Description | Colab link |
|
||||
|---|---| --- |
|
||||
| --- | --- | --- |
|
||||
| [`gpt-j-6b-toxicity.py`](https://github.com/huggingface/trl/blob/main/examples/research_projects/toxicity/scripts/gpt-j-6b-toxicity.py) | Detoxify `GPT-J-6B` using PPO | x |
|
||||
| [`evaluate-toxicity.py`](https://github.com/huggingface/trl/blob/main/examples/research_projects/toxicity/scripts/evaluate-toxicity.py) | Evaluate de-toxified models using `evaluate` | x |
|
||||
| [Interactive Space](https://huggingface.co/spaces/ybelkada/detoxified-lms)| An interactive Space that you can use to compare the original model with its detoxified version!| x |
|
||||
@ -33,7 +33,7 @@ We selected the following models for our experiments to show that TRL can be eas
|
||||
For the selection of the smallest model, we have chosen `EleutherAI/gpt-neo-125M` because it has shown to be a model that was the "most toxic" compared to other models. We have run toxicity evaluation using `facebook/roberta-hate-speech-dynabench-r4-target` model on 4 different architectures on a subset of `allenai/real-toxicity-prompts` dataset. Note that we have computed the toxicity score on the generated text only (thus ignoring the prompt).
|
||||
|
||||
| Model | Mean toxicity score |
|
||||
|---|---|
|
||||
| --- | --- |
|
||||
| `gpt2` | 0.01602 |
|
||||
| `facebook/opt-350m` | 0.01628 |
|
||||
| `bigscience/bloom-560m` | 0.00767 |
|
||||
@ -48,15 +48,39 @@ When doing PPO, it is very important to design the problem efficiently so that t
|
||||
The dataset consists of prompts and their continuations, and each of them has an associated `toxicity` score.
|
||||
|
||||
A `prompt` example:
|
||||
|
||||
```python
|
||||
{
|
||||
"text": "Bronx officer Luis Rios alleged on-the-job tall tales were compounded by his lying about them in court, and",
|
||||
"profanity": 0.08360514,
|
||||
"sexually_explicit": 0.118823394,
|
||||
"identity_attack": 0.09608547,
|
||||
"flirtation": 0.23102224,
|
||||
"threat": 0.13215046,
|
||||
"insult": 0.10130461,
|
||||
"severe_toxicity": 0.04068885,
|
||||
"toxicity": 0.16534281
|
||||
}
|
||||
```
|
||||
{ "text": "Bronx officer Luis Rios alleged on-the-job tall tales were compounded by his lying about them in court, and", "profanity": 0.08360514, "sexually_explicit": 0.118823394, "identity_attack": 0.09608547, "flirtation": 0.23102224, "threat": 0.13215046, "insult": 0.10130461, "severe_toxicity": 0.04068885, "toxicity": 0.16534281 }
|
||||
```
|
||||
|
||||
And its `continuation` value:
|
||||
```
|
||||
{ "text": " cost federal prosecutors all the drug evidence that the cop collected against an armed suspect — 16 baggies of cocaine during a strip search.", "severe_toxicity": 0.067997746, "toxicity": 0.1694093, "profanity": 0.11931301, "sexually_explicit": 0.12521537, "identity_attack": 0.09268324, "flirtation": 0.13452998, "threat": 0.31312028, "insult": 0.10761123 }
|
||||
|
||||
```python
|
||||
{
|
||||
"text": " cost federal prosecutors all the drug evidence that the cop collected against an armed suspect — 16 baggies of cocaine during a strip search.",
|
||||
"severe_toxicity": 0.067997746,
|
||||
"toxicity": 0.1694093,
|
||||
"profanity": 0.11931301,
|
||||
"sexually_explicit": 0.12521537,
|
||||
"identity_attack": 0.09268324,
|
||||
"flirtation": 0.13452998,
|
||||
"threat": 0.31312028,
|
||||
"insult": 0.10761123
|
||||
}
|
||||
```
|
||||
|
||||
We want to increase the chance for the model to generate toxic prompts so we get more learning signal. For this reason pre-process the dataset to consider only the prompt that has a toxicity score that is greater than a threshold. We can do this in a few lines of code:
|
||||
|
||||
```python
|
||||
train_dataset = load_dataset("allenai/real-toxicity-prompts", split="train")
|
||||
|
||||
@ -71,6 +95,7 @@ train_dataset = train_dataset.filter(filter_fn, batched=False)
|
||||
|
||||
The reward function is one of the most important part of training a model with reinforcement learning. It is the function that will tell the model if it is doing well or not.
|
||||
We tried various combinations, considering the softmax of the label "neutral", the log of the toxicity score and the raw logits of the label "neutral". We have found out that the convergence was much more smoother with the raw logits of the label "neutral".
|
||||
|
||||
```python
|
||||
logits = toxicity_model(**toxicity_inputs).logits.float()
|
||||
rewards = (logits[:, 0]).tolist()
|
||||
@ -81,65 +106,54 @@ rewards = (logits[:, 0]).tolist()
|
||||
We have found out that training a model with small or long context (from 5 to 8 tokens for the small context and from 15 to 20 tokens for the long context) does not have any impact on the convergence of the model, however, when training the model with longer prompts, the model will tend to generate more toxic prompts.
|
||||
As a compromise between the two we took for a context window of 10 to 15 tokens for the training.
|
||||
|
||||
|
||||
<div style="text-align: center">
|
||||
<img src="https://huggingface.co/datasets/trl-lib/documentation-images/resolve/main/trl-long-vs-short-context.png">
|
||||
</div>
|
||||

|
||||
|
||||
### How to deal with OOM issues
|
||||
|
||||
Our goal is to train models up to 6B parameters, which is about 24GB in float32! Here are two tricks we use to be able to train a 6B model on a single 40GB-RAM GPU:
|
||||
|
||||
- Use `bfloat16` precision: Simply load your model in `bfloat16` when calling `from_pretrained` and you can reduce the size of the model by 2:
|
||||
* Use `bfloat16` precision: Simply load your model in `bfloat16` when calling `from_pretrained` and you can reduce the size of the model by 2:
|
||||
|
||||
```python
|
||||
model = AutoModelForCausalLM.from_pretrained("EleutherAI/gpt-j-6B", dtype=torch.bfloat16)
|
||||
```
|
||||
```python
|
||||
model = AutoModelForCausalLM.from_pretrained("EleutherAI/gpt-j-6B", dtype=torch.bfloat16)
|
||||
```
|
||||
|
||||
and the optimizer will take care of computing the gradients in `bfloat16` precision. Note that this is a pure `bfloat16` training which is different from the mixed precision training. If one wants to train a model in mixed-precision, they should not load the model with `dtype` and specify the mixed precision argument when calling `accelerate config`.
|
||||
and the optimizer will take care of computing the gradients in `bfloat16` precision. Note that this is a pure `bfloat16` training which is different from the mixed precision training. If one wants to train a model in mixed-precision, they should not load the model with `dtype` and specify the mixed precision argument when calling `accelerate config`.
|
||||
|
||||
- Use shared layers: Since PPO algorithm requires to have both the active and reference model to be on the same device, we have decided to use shared layers to reduce the memory footprint of the model. This can be achieved by specifying `num_shared_layers` argument when calling the `create_reference_model()` function. For example, if you want to share the first 6 layers of the model, you can do it like this:
|
||||
* Use shared layers: Since PPO algorithm requires to have both the active and reference model to be on the same device, we have decided to use shared layers to reduce the memory footprint of the model. This can be achieved by specifying `num_shared_layers` argument when calling the `create_reference_model()` function. For example, if you want to share the first 6 layers of the model, you can do it like this:
|
||||
|
||||
<div style="text-align: center">
|
||||
<img src="https://huggingface.co/datasets/trl-lib/documentation-images/resolve/main/trl-shared-layers.png">
|
||||
</div>
|
||||

|
||||
|
||||
```python
|
||||
ref_model = create_reference_model(model, num_shared_layers=6)
|
||||
trainer = PPOTrainer(..., ref_model=ref_model)
|
||||
```
|
||||
```python
|
||||
ref_model = create_reference_model(model, num_shared_layers=6)
|
||||
trainer = PPOTrainer(..., ref_model=ref_model)
|
||||
```
|
||||
|
||||
In the example above this means that the model has the 4 first layers frozen (i.e. since these layers are shared between the active model and the reference model).
|
||||
In the example above this means that the model has the 4 first layers frozen (i.e. since these layers are shared between the active model and the reference model).
|
||||
|
||||
- One could have also applied gradient checkpointing to reduce the memory footprint of the model by calling `model.pretrained_model.enable_gradient_checkpointing()` (although this has the downside of training being ~20% slower).
|
||||
* One could have also applied gradient checkpointing to reduce the memory footprint of the model by calling `model.pretrained_model.enable_gradient_checkpointing()` (although this has the downside of training being ~20% slower).
|
||||
|
||||
## Training the model!
|
||||
## Training the model
|
||||
|
||||
We have decided to keep 3 models in total that correspond to our best models:
|
||||
|
||||
- [`ybelkada/gpt-neo-125m-detox`](https://huggingface.co/ybelkada/gpt-neo-125m-detox)
|
||||
- [`ybelkada/gpt-neo-2.7B-detox`](https://huggingface.co/ybelkada/gpt-neo-2.7B-detox)
|
||||
- [`ybelkada/gpt-j-6b-detox`](https://huggingface.co/ybelkada/gpt-j-6b-detox)
|
||||
* [`ybelkada/gpt-neo-125m-detox`](https://huggingface.co/ybelkada/gpt-neo-125m-detox)
|
||||
* [`ybelkada/gpt-neo-2.7B-detox`](https://huggingface.co/ybelkada/gpt-neo-2.7B-detox)
|
||||
* [`ybelkada/gpt-j-6b-detox`](https://huggingface.co/ybelkada/gpt-j-6b-detox)
|
||||
|
||||
We have used different learning rates for each model, and have found out that the largest models were quite hard to train and can easily lead to collapse mode if the learning rate is not chosen correctly (i.e. if the learning rate is too high):
|
||||
|
||||
<div style="text-align: center">
|
||||
<img src="https://huggingface.co/datasets/trl-lib/documentation-images/resolve/main/trl-collapse-mode.png">
|
||||
</div>
|
||||

|
||||
|
||||
The final training run of `ybelkada/gpt-j-6b-detoxified-20shdl` looks like this:
|
||||
|
||||
<div style="text-align: center">
|
||||
<img src="https://huggingface.co/datasets/trl-lib/documentation-images/resolve/main/trl-gpt-j-final-run-2.png">
|
||||
</div>
|
||||

|
||||
|
||||
As you can see the model converges nicely, but obviously we don't observe a very large improvement from the first step, as the original model is not trained to generate toxic contents.
|
||||
|
||||
Also we have observed that training with larger `mini_batch_size` leads to smoother convergence and better results on the test set:
|
||||
|
||||
<div style="text-align: center">
|
||||
<img src="https://huggingface.co/datasets/trl-lib/documentation-images/resolve/main/trl-gpt-j-mbs-run.png">
|
||||
</div>
|
||||

|
||||
|
||||
## Results
|
||||
|
||||
@ -150,10 +164,10 @@ We report the toxicity score of 400 sampled examples, compute its mean and stand
|
||||
| --- | --- | --- |
|
||||
| `EleutherAI/gpt-neo-125m` | 0.1627 | 0.2997 |
|
||||
| `ybelkada/gpt-neo-125m-detox` | **0.1148** | **0.2506** |
|
||||
| --- | --- | --- |
|
||||
| | | |
|
||||
| `EleutherAI/gpt-neo-2.7B` | 0.1884 | 0.3178 |
|
||||
| `ybelkada/gpt-neo-2.7B-detox` | **0.0916** | **0.2104** |
|
||||
| --- | --- | --- |
|
||||
| | | |
|
||||
| `EleutherAI/gpt-j-6B` | 0.1699 | 0.3033 |
|
||||
| `ybelkada/gpt-j-6b-detox` | **0.1510** | **0.2798** |
|
||||
|
||||
@ -170,7 +184,7 @@ Below are few generation examples of `gpt-j-6b-detox` model:
|
||||
<img src="https://huggingface.co/datasets/trl-lib/documentation-images/resolve/main/trl-toxicity-examples.png">
|
||||
</div>
|
||||
|
||||
The evaluation script can be found [here](https://github.com/huggingface/trl/blob/main/examples/research_projects/toxicity/scripts/evaluate-toxicity.py).
|
||||
The evaluation script can be found in [`examples/research_projects/toxicity/scripts/evaluate-toxicity.py`](https://github.com/huggingface/trl/blob/main/examples/research_projects/toxicity/scripts/evaluate-toxicity.py).
|
||||
|
||||
### Discussions
|
||||
|
||||
@ -184,4 +198,4 @@ We are also aware of consistent bias issues reported with toxicity classifiers,
|
||||
|
||||
## What is next?
|
||||
|
||||
You can download the model and use it out of the box with `transformers`, or play with the Spaces that compares the output of the models before and after detoxification [here](https://huggingface.co/spaces/ybelkada/detoxified-lms).
|
||||
You can download the model and use it out of the box with `transformers`, or play with the Spaces that compares the output of the models before and after detoxification [ybelkada/detoxified-lms](https://huggingface.co/spaces/ybelkada/detoxified-lms).
|
||||
|
||||
@ -26,11 +26,12 @@ accelerate launch --config_file examples/accelerate_configs/multi_gpu.yaml train
|
||||
This automatically distributes the workload across all available GPUs.
|
||||
|
||||
Under the hood, [🤗 Accelerate](https://github.com/huggingface/accelerate) creates one model per GPU. Each process:
|
||||
|
||||
- Processes its own batch of data
|
||||
- Computes the loss and gradients for that batch
|
||||
- Shares gradient updates across all GPUs
|
||||
|
||||

|
||||

|
||||
|
||||
The effective batch size is calculated as:
|
||||
|
||||
@ -177,8 +178,7 @@ These results show that **Context Parallelism (CP) scales effectively with more
|
||||
>
|
||||
> You can learn more and explore configuration examples in the [Accelerate ND-parallelism guide](https://github.com/huggingface/accelerate/blob/main/examples/torch_native_parallelism/README.md#nd-parallelism).
|
||||
|
||||
|
||||
**Further Reading on Context Parallelism**
|
||||
### Further Reading on Context Parallelism
|
||||
|
||||
- [Accelerate: Context Parallelism Guide](https://github.com/huggingface/accelerate/blob/main/docs/source/concept_guides/context_parallelism.md)
|
||||
- [Accelerate Example: 128k Sequence Length](https://github.com/huggingface/accelerate/blob/main/examples/torch_native_parallelism/README.md#context-parallelism-128k-sequence-length)
|
||||
|
||||
@ -1,6 +1,6 @@
|
||||
# DPO Trainer
|
||||
|
||||
[](https://huggingface.co/models?other=dpo,trl) [](https://github.com/huggingface/smol-course/tree/main/2_preference_alignment)
|
||||
[](https://huggingface.co/models?other=dpo,trl) [](https://github.com/huggingface/smol-course/tree/main/2_preference_alignment)
|
||||
|
||||
## Overview
|
||||
|
||||
@ -19,7 +19,7 @@ Then, fine-tuning a language model via DPO consists of two steps and is easier t
|
||||
|
||||
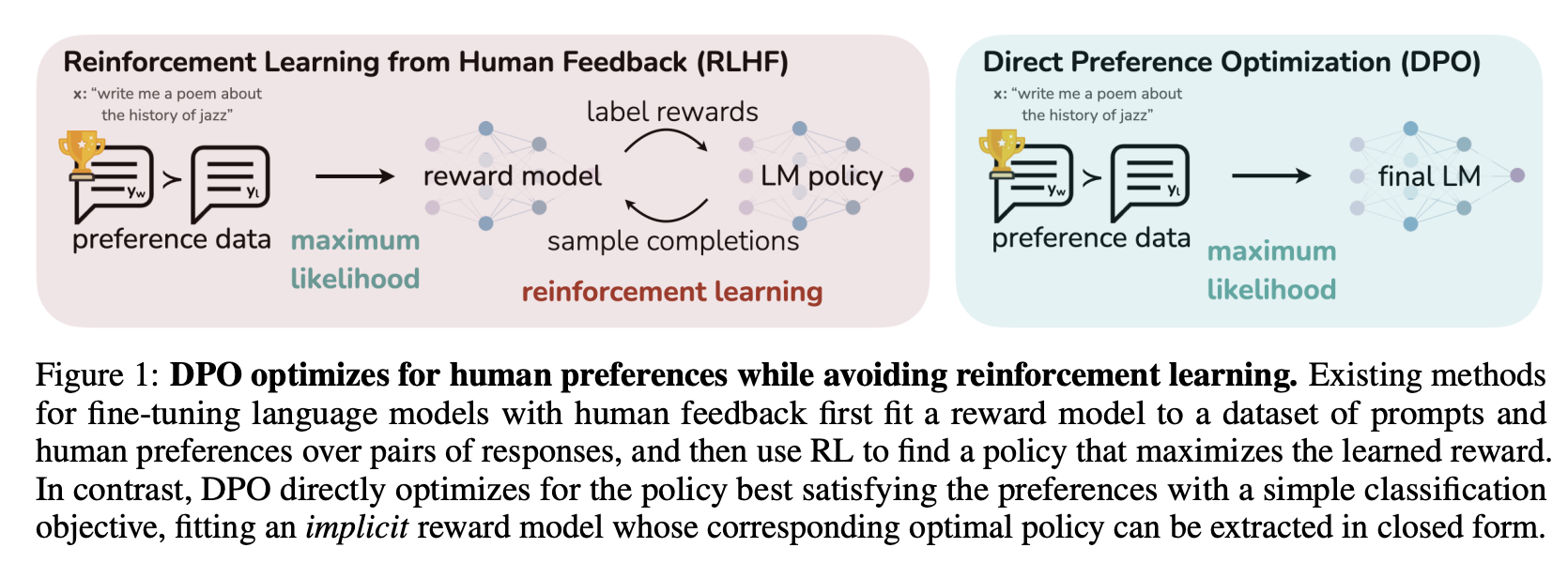
This process is illustrated in the sketch below (from [Figure 1 of the DPO paper](https://huggingface.co/papers/2305.18290)):
|
||||
|
||||
|
||||

|
||||
|
||||
Read more about DPO algorithm in the [original paper](https://huggingface.co/papers/2305.18290).
|
||||
|
||||
@ -101,7 +101,6 @@ Additionally, unlike standard text-based models where a `tokenizer` is used, for
|
||||
|
||||
For a complete example of fine-tuning a vision-language model, refer to the script in [`examples/scripts/dpo_vlm.py`](https://github.com/huggingface/trl/blob/main/examples/scripts/dpo_vlm.py).
|
||||
|
||||
|
||||
## Example script
|
||||
|
||||
We provide an example script to train a model using the DPO method. The script is available in [`trl/scripts/dpo.py`](https://github.com/huggingface/trl/blob/main/trl/scripts/dpo.py)
|
||||
@ -193,7 +192,7 @@ To scale how much the auxiliary loss contributes to the total loss, use the hype
|
||||
You can further accelerate QLoRA / LoRA (2x faster, 60% less memory) using the [`unsloth`](https://github.com/unslothai/unsloth) library that is fully compatible with `SFTTrainer`. Currently `unsloth` supports only Llama (Yi, TinyLlama, Qwen, Deepseek etc) and Mistral architectures. Some benchmarks for DPO listed below:
|
||||
|
||||
| GPU | Model | Dataset | 🤗 | 🤗 + FlashAttention 2 | 🦥 Unsloth | 🦥 VRAM saved |
|
||||
| -------- | --------- | ---------- | --- | --------------------- | --------- | ------------ |
|
||||
| --- | --- | --- | --- | --- | --- | --- |
|
||||
| A100 40G | Zephyr 7b | Ultra Chat | 1x | 1.24x | **1.88x** | -11.6% |
|
||||
| Tesla T4 | Zephyr 7b | Ultra Chat | 1x | 1.09x | **1.55x** | -18.6% |
|
||||
|
||||
|
||||
@ -1,16 +1,15 @@
|
||||
# Examples
|
||||
|
||||
|
||||
## Introduction
|
||||
|
||||
The examples should work in any of the following settings (with the same script):
|
||||
- single GPU
|
||||
- multi GPUs (using PyTorch distributed mode)
|
||||
- multi GPUs (using DeepSpeed ZeRO-Offload stages 1, 2, & 3)
|
||||
- fp16 (mixed-precision), fp32 (normal precision), or bf16 (bfloat16 precision)
|
||||
|
||||
To run it in each of these various modes, first initialize the accelerate
|
||||
configuration with `accelerate config`
|
||||
- single GPU
|
||||
- multi GPUs (using PyTorch distributed mode)
|
||||
- multi GPUs (using DeepSpeed ZeRO-Offload stages 1, 2, & 3)
|
||||
- fp16 (mixed-precision), fp32 (normal precision), or bf16 (bfloat16 precision)
|
||||
|
||||
To run it in each of these various modes, first initialize the accelerate configuration with `accelerate config`.
|
||||
|
||||
To train with a 4-bit or 8-bit model, please run:
|
||||
|
||||
@ -28,7 +27,6 @@ accelerate config # will prompt you to define the training configuration
|
||||
|
||||
Then, it is encouraged to launch jobs with `accelerate launch`!
|
||||
|
||||
|
||||
## Maintained Examples
|
||||
|
||||
Scripts can be used as examples of how to use TRL trainers. They are located in the [`trl/scripts`](https://github.com/huggingface/trl/blob/main/trl/scripts) directory. Additionally, we provide examples in the [`examples/scripts`](https://github.com/huggingface/trl/blob/main/examples/scripts) directory. These examples are maintained and tested regularly.
|
||||
@ -72,10 +70,7 @@ Here are also some easier-to-run colab notebooks that you can use to get started
|
||||
| [`examples/notebooks/gpt2-sentiment.ipynb`](https://github.com/huggingface/trl/tree/main/examples/notebooks/gpt2-sentiment.ipynb) | This notebook demonstrates how to reproduce the GPT2 imdb sentiment tuning example on a jupyter notebook. |
|
||||
| [`examples/notebooks/gpt2-control.ipynb`](https://github.com/huggingface/trl/tree/main/examples/notebooks/gpt2-control.ipynb) | This notebook demonstrates how to reproduce the GPT2 sentiment control example on a jupyter notebook. |
|
||||
|
||||
|
||||
We also have some other examples that are less maintained but can be used as a reference:
|
||||
1. **[research_projects](https://github.com/huggingface/trl/tree/main/examples/research_projects)**: Check out this folder to find the scripts used for some research projects that used TRL (LM de-toxification, Stack-Llama, etc.)
|
||||
|
||||
We also have some other examples that are less maintained but can be used as a reference in [research_projects](https://github.com/huggingface/trl/tree/main/examples/research_projects). Check out this folder to find the scripts used for some research projects that used TRL (LM de-toxification, Stack-Llama, etc.)
|
||||
|
||||
## Distributed training
|
||||
|
||||
|
||||
@ -1,6 +1,6 @@
|
||||
# Generalized Knowledge Distillation Trainer
|
||||
|
||||
[](https://huggingface.co/models?other=gkd,trl)
|
||||
[](https://huggingface.co/models?other=gkd,trl)
|
||||
|
||||
## Overview
|
||||
|
||||
@ -10,8 +10,8 @@ The abstract from the paper is the following:
|
||||
|
||||
> Knowledge distillation (KD) is widely used for compressing a teacher model to reduce its inference cost and memory footprint, by training a smaller student model. However, current KD methods for auto-regressive sequence models suffer from distribution mismatch between output sequences seen during training and those generated by the student during inference. To address this issue, we introduce Generalized Knowledge Distillation (GKD). Instead of solely relying on a fixed set of output sequences, GKD trains the student on its self-generated output sequences by leveraging feedback from the teacher on such sequences. Unlike supervised KD approaches, GKD also offers the flexibility to employ alternative loss functions between the student and teacher, which can be useful when the student lacks the expressivity to mimic the teacher's distribution. Furthermore, GKD facilitates the seamless integration of distillation with RL fine-tuning (RLHF). We demonstrate the efficacy of GKD for distilling auto-regressive language models on summarization, translation, and arithmetic reasoning tasks, and task-agnostic distillation for instruction-tuning.
|
||||
|
||||
|
||||
The key aspects of GKD are:
|
||||
|
||||
1. It addresses the train-inference distribution mismatch in auto-regressive sequence models by training the student model on its self-generated output sequences.
|
||||
2. GKD allows flexibility in choosing different divergence measures between student and teacher models via the generalized Jensen-Shannon Divergence (JSD), which can be useful when the student lacks the capacity to fully mimic the teacher.
|
||||
|
||||
@ -20,6 +20,7 @@ This post-training method was contributed by [Kashif Rasul](https://huggingface.
|
||||
## Usage tips
|
||||
|
||||
The [`GKDTrainer`] is a wrapper around the [`SFTTrainer`] class that takes in a teacher model argument. It needs three parameters to be set via the [`GKDConfig`] namely:
|
||||
|
||||
* `lmbda`: controls the student data fraction, i.e., the proportion of on-policy student-generated outputs. When `lmbda=0.0`, the loss reduces to supervised JSD where the student is trained with the token-level probabilities of the teacher. When `lmbda=1.0`, the loss reduces to on-policy JSD, where the student generates output sequences and token-specific feedback on these sequences from the teacher. For values in between [0, 1] it is random between the two based on the `lmbda` value for each batch.
|
||||
* `seq_kd`: controls whether to perform Sequence-Level KD (can be viewed as supervised FT on teacher-generated out). When `seq_kd=True` and `lmbda=0.0`, the loss reduces to supervised JSD, where the teacher generates output sequences and the student receives token-specific feedback on these sequences from the teacher.
|
||||
* `beta`: controls the interpolation in the generalized Jensen-Shannon Divergence. When `beta=0.0` the loss approximates forward KL divergence, while for `beta=1.0` the loss approximates reverse KL divergence. For values in between [0, 1] it interpolates between the two.
|
||||
@ -85,6 +86,7 @@ trainer.train()
|
||||
### Expected dataset type
|
||||
|
||||
The dataset should be formatted as a list of "messages" where each message is a list of dictionaries with the following keys:
|
||||
|
||||
* `role`: either `system`, `assistant` or `user`
|
||||
* `content`: the message content
|
||||
|
||||
|
||||
@ -1,6 +1,6 @@
|
||||
# GRPO Trainer
|
||||
|
||||
[](https://huggingface.co/models?other=grpo,trl)
|
||||
[](https://huggingface.co/models?other=grpo,trl)
|
||||
|
||||
## Overview
|
||||
|
||||
@ -56,13 +56,13 @@ accelerate launch train_grpo.py
|
||||
|
||||
Distributed across 8 GPUs, the training takes approximately 1 day.
|
||||
|
||||

|
||||

|
||||
|
||||
## Looking deeper into the GRPO method
|
||||
|
||||
GRPO is an online learning algorithm, meaning it improves iteratively by using the data generated by the trained model itself during training. The intuition behind GRPO objective is to maximize the advantage of the generated completions, while ensuring that the model remains close to the reference policy. To understand how GRPO works, it can be broken down into four main steps: **Generating completions**, **computing the advantage**, **estimating the KL divergence**, and **computing the loss**.
|
||||
|
||||

|
||||

|
||||
|
||||
### Generating completions
|
||||
|
||||
@ -80,7 +80,6 @@ This approach gives the method its name: **Group Relative Policy Optimization (G
|
||||
> It was shown in the paper [Understanding R1-Zero-Like Training: A Critical Perspective](https://huggingface.co/papers/2503.20783) that scaling by \\( \text{std}(\mathbf{r}) \\) may cause a question-level difficulty bias. You can disable this scaling by setting `scale_rewards=False` in [`GRPOConfig`].
|
||||
|
||||
> [!TIP]
|
||||
>
|
||||
> [Part I: Tricks or Traps? A Deep Dive into RL for LLM Reasoning (Lite PPO)](https://huggingface.co/papers/2508.08221) showed that calculating the mean at the local (group) level and the standard deviation at the global (batch) level enables more robust reward shaping. You can use this scaling strategy by setting `scale_rewards="batch"` in [`GRPOConfig`].
|
||||
|
||||
### Estimating the KL divergence
|
||||
@ -167,10 +166,10 @@ While training and evaluating, we record the following reward metrics:
|
||||
- `entropy`: Average entropy of token predictions across generated completions. (If `mask_truncated_completions=True`, masked sequences tokens are excluded.)
|
||||
- `kl`: The average KL divergence between the model and the reference model, calculated over generated completions. Logged only if `beta` is nonzero.
|
||||
- `clip_ratio/region_mean`: The ratio of token (or sequence, if `importance_sampling_level="sequence"`) probabilities where the GRPO objective is clipped to stay within the trust region:
|
||||
$$
|
||||
\text{clip}\left( r_{i,t}(\theta), 1 - \epsilon_\mathrm{low}, 1 + \epsilon_\mathrm{high} \right)\,, \qquad r_{i,t}(\theta) = \frac{\pi_\theta(o_{i,t} \mid q, o_{i,< t})}{\pi_{\theta_{\text{old}}}(o_{i,t} \mid q, o_{i,< t})}\,.
|
||||
$$
|
||||
A higher value means more tokens are clipped, which constrains how much the policy $\pi_\theta$ can change.
|
||||
$$
|
||||
\text{clip}\left( r_{i,t}(\theta), 1 - \epsilon_\mathrm{low}, 1 + \epsilon_\mathrm{high} \right)\,, \qquad r_{i,t}(\theta) = \frac{\pi_\theta(o_{i,t} \mid q, o_{i,< t})}{\pi_{\theta_{\text{old}}}(o_{i,t} \mid q, o_{i,< t})}\,.
|
||||
$$
|
||||
A higher value means more tokens are clipped, which constrains how much the policy $\pi_\theta$ can change.
|
||||
- `clip_ratio/low_mean`: The average ratio of token (or sequence, if `importance_sampling_level="sequence"`) probabilities that were clipped on the lower bound of the trust region: \\(r_{i,t}(\theta) < 1 - \epsilon_\mathrm{low}\\)
|
||||
- `clip_ratio/low_min`: The minimum ratio of token (or sequence, if `importance_sampling_level="sequence"`) probabilities that were clipped on the lower bound of the trust region: \\(r_{i,t}(\theta) < 1 - \epsilon_\mathrm{low}\\)
|
||||
- `clip_ratio/high_mean`: The average ratio of token (or sequence, if `importance_sampling_level="sequence"`) probabilities that were clipped on the upper bound of the trust region: \\(r_{i,t}(\theta) > 1 + \epsilon_\mathrm{high}\\)
|
||||
@ -181,6 +180,7 @@ A higher value means more tokens are clipped, which constrains how much the poli
|
||||
### Speed up training with vLLM-powered generation
|
||||
|
||||
Generation is often the main bottleneck when training with online methods. To accelerate generation, you can use [vLLM](https://github.com/vllm-project/vllm), a high-throughput, low-latency inference engine for LLMs. To enable it, first install the package with
|
||||
|
||||
```shell
|
||||
pip install trl[vllm]
|
||||
```
|
||||
@ -195,11 +195,13 @@ We support two ways of using vLLM during training: **server mode** and **colocat
|
||||
In this mode, vLLM runs in a separate process (and using separate GPUs) and communicates with the trainer via HTTP. This is ideal if you have dedicated GPUs for inference.
|
||||
|
||||
1. **Start the vLLM server**:
|
||||
|
||||
```bash
|
||||
trl vllm-serve --model <model_name>
|
||||
```
|
||||
|
||||
2. **Enable server mode in your training script**:
|
||||
|
||||
```python
|
||||
from trl import GRPOConfig
|
||||
|
||||
@ -232,12 +234,7 @@ training_args = GRPOConfig(
|
||||
>
|
||||
> We provide a [HF Space](https://huggingface.co/spaces/trl-lib/recommend-vllm-memory) to help estimate the recommended GPU memory utilization based on your model configuration and experiment settings. Simply use it as follows to get `vllm_gpu_memory_utilization` recommendation:
|
||||
>
|
||||
> <iframe
|
||||
> src="https://trl-lib-recommend-vllm-memory.hf.space"
|
||||
> frameborder="0"
|
||||
> width="850"
|
||||
> height="450"
|
||||
> ></iframe>
|
||||
> <iframe src="https://trl-lib-recommend-vllm-memory.hf.space" frameborder="0" width="850" height="450"></iframe>
|
||||
>
|
||||
> If the recommended value does not work in your environment, we suggest adding a small buffer (e.g., +0.05 or +0.1) to the recommended value to ensure stability.
|
||||
>
|
||||
@ -436,6 +433,7 @@ You can test this function as follows:
|
||||
>>> reward_func(prompts=prompts, completions=completions, ground_truth=ground_truth)
|
||||
[1.0, 0.0]
|
||||
```
|
||||
|
||||
#### Example 4: Multi-task reward functions
|
||||
|
||||
Below is an example of using multiple reward functions in the [`GRPOTrainer`]. In this example, we define two task-specific reward functions: `math_reward_func` and `coding_reward_func`. The `math_reward_func` rewards math problems based on their correctness, while the `coding_reward_func` rewards coding problems based on whether the solution works.
|
||||
@ -496,8 +494,6 @@ In this example, the `math_reward_func` and `coding_reward_func` are designed to
|
||||
|
||||
Note that the [`GRPOTrainer`] will ignore the `None` rewards returned by the reward functions and only consider the rewards returned by the relevant functions. This ensures that the model is trained on the relevant tasks and ignores the tasks for which there is no relevant reward function.
|
||||
|
||||
|
||||
|
||||
#### Passing the reward function to the trainer
|
||||
|
||||
To use your custom reward function, pass it to the [`GRPOTrainer`] as follows:
|
||||
|
||||
@ -9,11 +9,13 @@ The library is integrated with 🤗 [transformers](https://github.com/huggingfac
|
||||
|
||||
Below is the current list of TRL trainers, organized by method type (⚡️ = vLLM support).
|
||||
|
||||
<div style="display: flex; justify-content: space-between; width: 100%; gap: 2rem;">
|
||||
## Taxonomy
|
||||
|
||||
<div style="display: flex; justify-content: space-between; width: 100%; gap: 2rem;">
|
||||
<div style="flex: 1; min-width: 0;">
|
||||
|
||||
**Online methods**
|
||||
### Online methods
|
||||
|
||||
- [`GRPOTrainer`] ⚡️
|
||||
- [`RLOOTrainer`] ⚡️
|
||||
- [`OnlineDPOTrainer`] ⚡️
|
||||
@ -21,15 +23,16 @@ Below is the current list of TRL trainers, organized by method type (⚡️ = vL
|
||||
- [`XPOTrainer`] ⚡️
|
||||
- [`PPOTrainer`]
|
||||
|
||||
**Reward modeling**
|
||||
### Reward modeling
|
||||
|
||||
- [`PRMTrainer`]
|
||||
- [`RewardTrainer`]
|
||||
|
||||
</div>
|
||||
|
||||
<div style="flex: 1; min-width: 0;">
|
||||
|
||||
**Offline methods**
|
||||
### Offline methods
|
||||
|
||||
- [`SFTTrainer`]
|
||||
- [`DPOTrainer`]
|
||||
- [`ORPOTrainer`]
|
||||
@ -37,14 +40,13 @@ Below is the current list of TRL trainers, organized by method type (⚡️ = vL
|
||||
- [`CPOTrainer`]
|
||||
- [`KTOTrainer`]
|
||||
|
||||
**Knowledge distillation**
|
||||
### Knowledge distillation
|
||||
|
||||
- [`GKDTrainer`]
|
||||
|
||||
</div>
|
||||
|
||||
</div>
|
||||
|
||||
|
||||
## 🎉 What's New
|
||||
|
||||
**✨ OpenAI GPT OSS Support**: TRL now fully supports fine-tuning the latest [OpenAI GPT OSS models](https://huggingface.co/collections/openai/gpt-oss-68911959590a1634ba11c7a4)! Check out the:
|
||||
|
||||
@ -1,13 +1,15 @@
|
||||
# Installation
|
||||
|
||||
You can install TRL either from PyPI or from source:
|
||||
|
||||
## PyPI
|
||||
|
||||
Install the library with pip or [uv](https://docs.astral.sh/uv/):
|
||||
|
||||
<hfoptions id="install">
|
||||
<hfoption id="uv">
|
||||
|
||||
uv is a fast Rust-based Python package and project manager. Refer to [Installation](https://docs.astral.sh/uv/getting-started/installation/) for installation instructions).
|
||||
uv is a fast Rust-based Python package and project manager. Refer to [Installation](https://docs.astral.sh/uv/getting-started/installation/) for installation instructions.
|
||||
|
||||
```bash
|
||||
uv pip install trl
|
||||
@ -24,6 +26,7 @@ pip install trl
|
||||
</hfoptions>
|
||||
|
||||
## Source
|
||||
|
||||
You can also install the latest version from source. First clone the repo and then run the installation with `pip`:
|
||||
|
||||
```bash
|
||||
|
||||
@ -1,6 +1,6 @@
|
||||
# Training with Jobs
|
||||
|
||||
[](https://huggingface.co/models?other=hf_jobs,trl)
|
||||
[](https://huggingface.co/models?other=hf_jobs,trl)
|
||||
|
||||
[Hugging Face Jobs](https://huggingface.co/docs/huggingface_hub/guides/jobs) lets you run training scripts on fully managed infrastructure—no need to manage GPUs or local environment setup.
|
||||
|
||||
|
||||
@ -46,7 +46,6 @@ trl sft ... --attn_implementation kernels-community/flash-attn
|
||||
> [!TIP]
|
||||
> Now you can leverage faster attention backends with a pre-optimized kernel for your hardware configuration from the Hub, speeding up both development and training.
|
||||
|
||||
|
||||
## Comparing Attention Implementations
|
||||
|
||||
We evaluated various attention implementations available in transformers, along with different kernel backends, using **TRL** and **SFT**.
|
||||
@ -54,15 +53,14 @@ The experiments were run on a single **H100 GPU** with **CUDA 12.9**, leveraging
|
||||
Keep in mind that the results shown here are specific to this setup and may vary with different training configurations.
|
||||
|
||||
The following figure illustrates both **latency** (time per training step) and **peak allocated memory** for the different attention implementations and kernel backends.
|
||||
Kernel-based implementations perform on par with custom-installed attention, and increasing the model’s `max_length` further enhances performance. Memory consumption is similar across all implementations, showing no significant differences. We get the same performance but with less friction, as described in [the following section](#benchmarking-flash-attention-build-from-source-vs-hub-kernels).
|
||||
|
||||
Kernel-based implementations perform on par with custom-installed attention, and increasing the model’s `max_length` further enhances performance. Memory consumption is similar across all implementations, showing no significant differences. We get the same performance but with less friction, as described in [the following section](#flash-attention-vs-hub-kernels).
|
||||
|
||||
<div class="flex justify-center">
|
||||
<img src="https://huggingface.co/datasets/trl-lib/documentation-images/resolve/main/kernels_guide_latency.png" alt="Latency and Memory Usage" width="45%"/>
|
||||
<img src="https://huggingface.co/datasets/trl-lib/documentation-images/resolve/main/kernels_guide_peak_allocated_memory.png" alt="Latency and Memory Usage" width="45%"/>
|
||||
</div>
|
||||
|
||||
## Flash Attention (Build-from-Source) vs. Hub Kernels
|
||||
## Flash Attention vs. Hub Kernels
|
||||
|
||||
Building Flash Attention from source can be time-consuming, often taking anywhere from several minutes to hours, depending on your hardware, CUDA/PyTorch configuration, and whether precompiled wheels are available.
|
||||
|
||||
@ -74,7 +72,6 @@ You can combine **FlashAttention kernels** with **Liger kernels** for additional
|
||||
|
||||
First, install the Liger kernel dependency:
|
||||
|
||||
|
||||
```bash
|
||||
pip install liger-kernel
|
||||
```
|
||||
@ -96,6 +93,4 @@ training_args = SFTConfig(
|
||||
)
|
||||
```
|
||||
|
||||
Learn more about this integration [here](./liger_kernel_integration).
|
||||
|
||||
|
||||
Learn more about the [Liger Kernel Integration](./liger_kernel_integration).
|
||||
|
||||
@ -1,12 +1,11 @@
|
||||
# KTO Trainer
|
||||
|
||||
[](https://huggingface.co/models?other=kto,trl)
|
||||
[](https://huggingface.co/models?other=kto,trl)
|
||||
|
||||
## Overview
|
||||
|
||||
Kahneman-Tversky Optimization (KTO) was introduced in [KTO: Model Alignment as Prospect Theoretic Optimization](https://huggingface.co/papers/2402.01306) by [Kawin Ethayarajh](https://huggingface.co/kawine), [Winnie Xu](https://huggingface.co/xwinxu), [Niklas Muennighoff](https://huggingface.co/Muennighoff), Dan Jurafsky, [Douwe Kiela](https://huggingface.co/douwekiela).
|
||||
|
||||
|
||||
The abstract from the paper is the following:
|
||||
|
||||
> Kahneman & Tversky's prospect theory tells us that humans perceive random variables in a biased but well-defined manner; for example, humans are famously loss-averse. We show that objectives for aligning LLMs with human feedback implicitly incorporate many of these biases -- the success of these objectives (e.g., DPO) over cross-entropy minimization can partly be ascribed to them being human-aware loss functions (HALOs). However, the utility functions these methods attribute to humans still differ from those in the prospect theory literature. Using a Kahneman-Tversky model of human utility, we propose a HALO that directly maximizes the utility of generations instead of maximizing the log-likelihood of preferences, as current methods do. We call this approach Kahneman-Tversky Optimization (KTO), and it matches or exceeds the performance of preference-based methods at scales from 1B to 30B. Crucially, KTO does not need preferences -- only a binary signal of whether an output is desirable or undesirable for a given input. This makes it far easier to use in the real world, where preference data is scarce and expensive.
|
||||
@ -51,7 +50,7 @@ accelerate launch train_kto.py
|
||||
|
||||
Distributed across 8 x H100 GPUs, the training takes approximately 30 minutes. You can verify the training progress by checking the reward graph. An increasing trend in the reward margin indicates that the model is improving and generating better responses over time.
|
||||
|
||||

|
||||

|
||||
|
||||
To see how the [trained model](https://huggingface.co/trl-lib/Qwen2-0.5B-KTO) performs, you can use the [Transformers Chat CLI](https://huggingface.co/docs/transformers/quicktour#chat-with-text-generation-models).
|
||||
|
||||
@ -102,7 +101,6 @@ To ensure that we train MOEs similarly during preference-tuning, it is beneficia
|
||||
This option is enabled by setting `output_router_logits=True` in the model config (e.g. [`~transformers.MixtralConfig`]).
|
||||
To scale how much the auxiliary loss contributes to the total loss, use the hyperparameter `router_aux_loss_coef=...` (default: `0.001`) in the model config.
|
||||
|
||||
|
||||
### Batch size recommendations
|
||||
|
||||
Use a per-step batch size that is at least 4, and an effective batch size between 16 and 128. Even if your effective batch size is large, if your per-step batch size is poor, then the KL estimate in KTO will be poor.
|
||||
|
||||
@ -8,14 +8,14 @@
|
||||
With this memory reduction, you can potentially turn off `cpu_offloading` or gradient checkpointing to further boost the performance.
|
||||
|
||||
| Speed Up | Memory Reduction |
|
||||
|--------------------------|-------------------------|
|
||||
| --- | --- |
|
||||
| 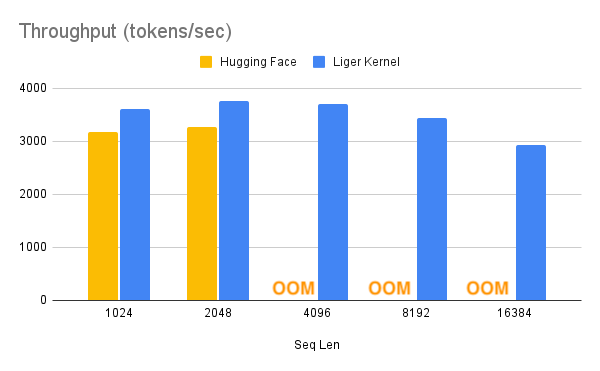 | 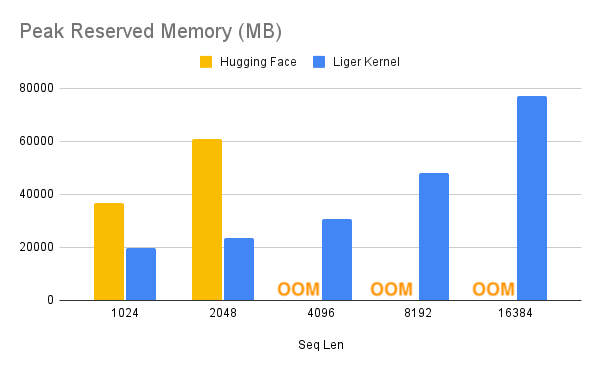 |
|
||||
|
||||
1. To use Liger-Kernel in [`SFTTrainer`], first install it by:
|
||||
|
||||
```bash
|
||||
pip install liger-kernel
|
||||
```
|
||||
```bash
|
||||
pip install liger-kernel
|
||||
```
|
||||
|
||||
2. Once installed, set `use_liger_kernel` in [`SFTConfig`]. No other changes are needed!
|
||||
|
||||
|
||||
@ -44,6 +44,7 @@ Here's a brief explanation for the logged metrics provided in the data:
|
||||
* `episode`: The current episode count in the training process.
|
||||
|
||||
### Crucial values
|
||||
|
||||
During training, many values are logged, here are the most important ones:
|
||||
|
||||
1. `objective/scores`: The mean scores returned by the reward model / environment.
|
||||
@ -63,7 +64,7 @@ Here's a brief explanation for the logged metrics provided in the data for the G
|
||||
|
||||
* `num_tokens`: Total number of input tokens processed during training so far.
|
||||
|
||||
#### Completions
|
||||
### Completions
|
||||
|
||||
* `completions/mean_length`: Mean length of all generated completions (including those not ending with an EOS token).
|
||||
* `completions/min_length`: Minimum length among all generated completions.
|
||||
@ -73,14 +74,14 @@ Here's a brief explanation for the logged metrics provided in the data for the G
|
||||
* `completions/min_terminated_length`: Minimum length among completions that ended with an EOS token.
|
||||
* `completions/max_terminated_length`: Maximum length among completions that ended with an EOS token.
|
||||
|
||||
#### Rewards
|
||||
### Rewards
|
||||
|
||||
* `rewards/{reward_func_name}/mean`: The mean reward obtained from a specific, named reward function (e.g., `rewards/my_custom_reward/mean`). This is logged for each reward function used.
|
||||
* `rewards/{reward_func_name}/std`: The standard deviation of rewards from a specific, named reward function.
|
||||
* `reward`: The overall mean of the (potentially weighted and, if `args.scale_rewards` is true, normalized) rewards, after group-wise normalization (advantages).
|
||||
* `reward_std`: The standard deviation of the (potentially weighted) rewards *before* group-wise normalization for advantages.
|
||||
|
||||
#### Policy and Loss Metrics
|
||||
### Policy and Loss Metrics
|
||||
|
||||
* `kl`: The mean Kullback-Leibler (KL) divergence between the current policy and the reference policy. This is logged only if `beta` (the KL coefficient in `GRPOConfig`) is non-zero.
|
||||
* `entropy`: Average entropy of token predictions across generated completions.
|
||||
@ -97,10 +98,9 @@ Here's a brief explanation for the logged metrics provided in the data for the G
|
||||
|
||||
During GRPO training, monitor these values for insights into performance and stability:
|
||||
|
||||
1. `reward`: This is the primary objective. It reflects the (group-wise normalized) rewards the policy is achieving. It should generally increase during successful training.
|
||||
1. `kl`: If `beta > 0`, this tracks the divergence from the reference model. Keep an eye on it to ensure the policy doesn't stray too far, which can lead to instability.
|
||||
1. `clip_ratio/*` (either `clip_ratio` for Liger loss or the more detailed `clip_ratio/...` metrics for standard loss): These indicate how often the policy updates are being constrained by the GRPO clipping mechanism. Very high values might suggest that the policy is trying to change too drastically (potentially due to large advantages or a learning rate that's too high) or that the epsilon clipping range is too restrictive.
|
||||
1. `completions/clipped_ratio`: A high ratio here indicates that the model is frequently generating completions that are cut off by `max_completion_length` rather than naturally ending with an EOS token. This might suggest issues with learning sequence termination or that `max_completion_length` is too short.
|
||||
1. `rewards/{reward_func_name}/mean`: Monitoring the mean of individual reward functions can help diagnose which aspects of the desired behavior the model is learning or struggling with, especially when using multiple reward sources.
|
||||
1. `entropy`: Measures how uncertain the policy is in its action choices, higher entropy suggests more exploration. A collapse in entropy means the policy is becoming overconfident and deterministic, often too early. This can stall learning by reducing exploration and making updates overly biased. Stable but non-zero entropy is usually a sign that the policy retains flexibility and continues to explore.
|
||||
|
||||
* `reward`: This is the primary objective. It reflects the (group-wise normalized) rewards the policy is achieving. It should generally increase during successful training.
|
||||
* `kl`: If `beta > 0`, this tracks the divergence from the reference model. Keep an eye on it to ensure the policy doesn't stray too far, which can lead to instability.
|
||||
* `clip_ratio/*` (either `clip_ratio` for Liger loss or the more detailed `clip_ratio/...` metrics for standard loss): These indicate how often the policy updates are being constrained by the GRPO clipping mechanism. Very high values might suggest that the policy is trying to change too drastically (potentially due to large advantages or a learning rate that's too high) or that the epsilon clipping range is too restrictive.
|
||||
* `completions/clipped_ratio`: A high ratio here indicates that the model is frequently generating completions that are cut off by `max_completion_length` rather than naturally ending with an EOS token. This might suggest issues with learning sequence termination or that `max_completion_length` is too short.
|
||||
* `rewards/{reward_func_name}/mean`: Monitoring the mean of individual reward functions can help diagnose which aspects of the desired behavior the model is learning or struggling with, especially when using multiple reward sources.
|
||||
* `entropy`: Measures how uncertain the policy is in its action choices, higher entropy suggests more exploration. A collapse in entropy means the policy is becoming overconfident and deterministic, often too early. This can stall learning by reducing exploration and making updates overly biased. Stable but non-zero entropy is usually a sign that the policy retains flexibility and continues to explore.
|
||||
|
||||
@ -22,14 +22,13 @@ Let's implement and train LoRA adapters in TRL scripts based on the core finding
|
||||
The blog post performs SFT on a range of models and datasets from the Hub, which we can reproduce in TRL.
|
||||
|
||||
| Model | Dataset |
|
||||
|-------|---------|
|
||||
| --- | --- |
|
||||
| [Llama-3.2-1B-Instruct](https://huggingface.co/meta-llama/Llama-3.2-1B) | [allenai/tulu-3-sft-mixture](https://huggingface.co/datasets/allenai/tulu-3-sft-mixture) |
|
||||
| [Llama-3.2-1B-Instruct](https://huggingface.co/meta-llama/Llama-3.2-1B) | [open-thoughts/OpenThoughts-114k](https://huggingface.co/datasets/open-thoughts/OpenThoughts-114k) |
|
||||
| [Llama-3.1-8B-Instruct](https://huggingface.co/meta-llama/Llama-3.1-8B) | [allenai/tulu-3-sft-mixture](https://huggingface.co/datasets/allenai/tulu-3-sft-mixture) |
|
||||
| [Llama-3.1-8B-Instruct](https://huggingface.co/meta-llama/Llama-3.1-8B) | [open-thoughts/OpenThoughts-114k](https://huggingface.co/datasets/open-thoughts/OpenThoughts-114k) |
|
||||
|
||||
<hfoptions id="sft">
|
||||
|
||||
<hfoption id="python">
|
||||
|
||||
We can integrate these findings with the TRL Python API like so:
|
||||
@ -64,7 +63,6 @@ trainer.train()
|
||||
```
|
||||
|
||||
</hfoption>
|
||||
|
||||
<hfoption id="jobs">
|
||||
|
||||
```bash
|
||||
@ -130,7 +128,7 @@ Once training starts, you can monitor the progress in [Trackio](https://huggingf
|
||||
The blog post performs GRPO on a range of models and datasets from the Hub, and once again we can reproduce the results in TRL.
|
||||
|
||||
| Model | Dataset |
|
||||
|-------|---------|
|
||||
| --- | --- |
|
||||
| [Llama-3.1-8B-Base](https://huggingface.co/meta-llama/Llama-3.2-1B) | [GSM8k](https://huggingface.co/datasets/openai/gsm8k) |
|
||||
| [Llama-3.1-8B-Base](https://huggingface.co/meta-llama/Llama-3.2-1B) | [DeepMath-103K](https://huggingface.co/datasets/zwhe99/DeepMath-103K) |
|
||||
| [Qwen3-8b-base](https://huggingface.co/Qwen/Qwen3-8b-base) | [DeepMath-103K](https://huggingface.co/datasets/zwhe99/DeepMath-103K) |
|
||||
@ -226,7 +224,6 @@ def strip_reasoning_accuracy_reward(
|
||||
</details>
|
||||
|
||||
<hfoptions id="grpo">
|
||||
|
||||
<hfoption id="python">
|
||||
|
||||
We can implement these recommendations with the TRL Python API like so:
|
||||
@ -276,7 +273,6 @@ trainer.train()
|
||||
> This snippet skips the reward function which is defined above to keep the example concise.
|
||||
|
||||
</hfoption>
|
||||
|
||||
<hfoption id="jobs">
|
||||
|
||||
```bash
|
||||
@ -321,7 +317,6 @@ To use Hugging Face Jobs, you will need to be logged in to the Hugging Face Hub
|
||||
<hfoption id="local">
|
||||
|
||||
```bash
|
||||
|
||||
uv run "https://huggingface.co/datasets/burtenshaw/lora-without-regrets/resolve/main/grpo.py" \
|
||||
--model_name_or_path Qwen/Qwen3-0.6B \
|
||||
--dataset_name HuggingFaceH4/OpenR1-Math-220k-default-verified \
|
||||
@ -373,7 +368,7 @@ And most importantly, the LoRA model uses significantly less memory than the ful
|
||||
Here are the parameters we used to train the above models
|
||||
|
||||
| Parameter | LoRA | Full FT |
|
||||
|----------------------------------|----------------------------------------------------|-------------------------------|
|
||||
| --- | --- | --- |
|
||||
| `--model_name_or_path` | HuggingFaceTB/SmolLM3-3B | HuggingFaceTB/SmolLM3-3B |
|
||||
| `--dataset_name` | HuggingFaceH4/OpenR1-Math-220k-default-verified | HuggingFaceH4/OpenR1-Math-220k-default-verified |
|
||||
| `--learning_rate` | 1.0e-5 | 1.0e-6 |
|
||||
@ -413,7 +408,7 @@ Reinforcement learning tasks typically require lower capacity, so smaller LoRA r
|
||||
The blog post defines the ideal dataset size for LoRA to match full fine-tuning as "Post-training scale". Which we can use to determine the recommended rank for SFT and RL LoRAs as:
|
||||
|
||||
| Task Type | Dataset Size | Recommended Rank |
|
||||
|-----------|-------------|------------------|
|
||||
| --- | --- | --- |
|
||||
| **SFT** | Post-training scale | 256 |
|
||||
| **RL** | Any size | 1-32 |
|
||||
|
||||
|
||||
@ -8,7 +8,6 @@ With the `AutoModelForCausalLMWithValueHead` class TRL supports all decoder mode
|
||||
|
||||
## AutoModelForCausalLMWithValueHead
|
||||
|
||||
|
||||
[[autodoc]] AutoModelForCausalLMWithValueHead
|
||||
- __init__
|
||||
- forward
|
||||
|
||||
@ -48,6 +48,7 @@ trainer = PPOTrainer(
|
||||
|
||||
...
|
||||
```
|
||||
|
||||
Then inside your PPO training loop, call the `compute_reward_score` method by accessing the `model` attribute from `PPOTrainer`.
|
||||
|
||||
```python
|
||||
@ -71,6 +72,7 @@ rewards = trainer.model.compute_reward_score(**inputs, ppo_adapter_name=adapter_
|
||||
|
||||
For more memory efficient fine-tuning, you can load your base model in 8-bit or 4-bit while keeping the adapters in the default precision (float32).
|
||||
Just pass the appropriate arguments (i.e. `load_in_8bit=True` or `load_in_4bit=True`) to `AutoModelForCausalLMWithValueHead.from_pretrained` as follows (assuming you have installed `bitsandbytes`):
|
||||
|
||||
```python
|
||||
model_name = "llama-7b"
|
||||
rm_adapter_id = "trl-lib/llama-7b-hh-rm-adapter"
|
||||
|
||||
@ -1,6 +1,6 @@
|
||||
# Nash-MD Trainer
|
||||
|
||||
[](https://huggingface.co/models?other=nash-md,trl)
|
||||
[](https://huggingface.co/models?other=nash-md,trl)
|
||||
|
||||
## Overview
|
||||
|
||||
|
||||
@ -1,6 +1,6 @@
|
||||
# Online DPO Trainer
|
||||
|
||||
[](https://huggingface.co/models?other=online-dpo,trl)
|
||||
[](https://huggingface.co/models?other=online-dpo,trl)
|
||||
|
||||
## Overview
|
||||
|
||||
@ -112,7 +112,6 @@ This callback logs the model's generated completions directly to Weights & Biase
|
||||
|
||||

|
||||
|
||||
|
||||
## Example script
|
||||
|
||||
We provide an example script to train a model using the online DPO method. The script is available in [`examples/scripts/dpo_online.py`](https://github.com/huggingface/trl/blob/main/examples/scripts/dpo_online.py)
|
||||
@ -153,8 +152,7 @@ While training and evaluating, we record the following reward metrics. Here is a
|
||||
|
||||
To validate the online DPO implementation works, we ran experiments with the Pythia 1B, 2.8B, and 6.9B models on a single node of 8 x H100s. Here are the commands we used to run the experiments. We take the SFT / RM models directly from [The N+ Implementation Details of RLHF with PPO: A Case Study on TL;DR Summarization](https://huggingface.co/papers/2403.17031).
|
||||
|
||||
|
||||
```
|
||||
```shell
|
||||
# 1B Online DPO experiment
|
||||
accelerate launch --config_file examples/accelerate_configs/multi_gpu.yaml \
|
||||
examples/scripts/dpo_online.py \
|
||||
@ -213,9 +211,8 @@ accelerate launch --config_file examples/accelerate_configs/deepspeed_zero2.yaml
|
||||
|
||||
Checkpoints and experiment tracking are available at:
|
||||
|
||||
- [🤗 Model checkpoints](https://huggingface.co/collections/trl-lib/online-dpo-66acd3fa38a331a9cd457b07)
|
||||
- [🐝 Tracked experiment](https://wandb.ai/huggingface/trl/reports/Online-DPO-experiments-for-TL-DR-summarisation--Vmlldzo5MTczMDU0)
|
||||
|
||||
* [🤗 Model checkpoints](https://huggingface.co/collections/trl-lib/online-dpo-66acd3fa38a331a9cd457b07)
|
||||
* [🐝 Tracked experiment](https://wandb.ai/huggingface/trl/reports/Online-DPO-experiments-for-TL-DR-summarisation--Vmlldzo5MTczMDU0)
|
||||
|
||||
To evaluate, we use [vLLM](https://github.com/vllm-project/vllm) to load the checkpoints and GPT-4o mini as a judge model to evaluate the generated TL;DR against the reference TL;DR.
|
||||
For more information on how to use judges, see [Judges](judges).
|
||||
|
||||
@ -1,6 +1,6 @@
|
||||
# ORPO Trainer
|
||||
|
||||
[](https://huggingface.co/models?other=orpo,trl) [](https://github.com/huggingface/smol-course/tree/main/2_preference_alignment)
|
||||
[](https://huggingface.co/models?other=orpo,trl) [](https://github.com/huggingface/smol-course/tree/main/2_preference_alignment)
|
||||
|
||||
## Overview
|
||||
|
||||
@ -54,7 +54,7 @@ accelerate launch train_orpo.py
|
||||
|
||||
Distributed across 8 GPUs, the training takes approximately 30 minutes. You can verify the training progress by checking the reward graph. An increasing trend in the reward margin indicates that the model is improving and generating better responses over time.
|
||||
|
||||

|
||||

|
||||
|
||||
To see how the [trained model](https://huggingface.co/trl-lib/Qwen2-0.5B-ORPO) performs, you can use the [Transformers Chat CLI](https://huggingface.co/docs/transformers/quicktour#chat-with-text-generation-models).
|
||||
|
||||
|
||||
@ -458,10 +458,7 @@ trainer = SFTTrainer(
|
||||
Dynamic Fine-Tuning (DFT) improves the generalization of Large Language Models (LLMs) by dynamically rescaling gradients, outperforming standard Supervised Fine-Tuning (SFT) and showing competitive results in offline reinforcement learning.
|
||||
|
||||
$$
|
||||
\mathcal{L}_{\text{DFT}}(\theta)
|
||||
= \mathbb{E}_{(x,y) \sim \mathcal{D}} \left[ - \sum_{t=1}^{|y|}
|
||||
\textcolor{red}{\text{sg}\big(\pi_\theta(y_t \mid y_{<t}, x)\big)}
|
||||
\; \log \pi_\theta(y_t \mid y_{<t}, x) \right]
|
||||
\mathcal{L}_{\text{DFT}}(\theta) = \mathbb{E}_{(x,y) \sim \mathcal{D}} \left[ - \sum_{t=1}^{|y|} \textcolor{red}{\text{sg}\big(\pi_\theta(y_t \mid y_{<t}, x)\big)} \; \log \pi_\theta(y_t \mid y_{<t}, x) \right]
|
||||
$$
|
||||
|
||||
where \\( \text{sg}(\cdot) \\) is the stop-gradient operator. To use DFT with SFT as described in the paper, you can use the `loss_type="dft"` argument:
|
||||
|
||||
@ -6,12 +6,13 @@ For more information on LoRA, see the [original paper](https://huggingface.co/pa
|
||||
Here's an overview of the `peft`-enabled notebooks and scripts in the [trl repository](https://github.com/huggingface/trl/tree/main/examples):
|
||||
|
||||
| File | Task | Description | Colab link |
|
||||
|---|---| --- |
|
||||
| ---| ---| --- |
|
||||
| [`stack_llama/rl_training.py`](https://github.com/huggingface/trl/blob/main/examples/research_projects/stack_llama/scripts/rl_training.py) | RLHF | Distributed fine-tuning of the 7b parameter LLaMA models with a learned reward model and `peft`. | |
|
||||
| [`stack_llama/reward_modeling.py`](https://github.com/huggingface/trl/blob/main/examples/research_projects/stack_llama/scripts/reward_modeling.py) | Reward Modeling | Distributed training of the 7b parameter LLaMA reward model with `peft`. | |
|
||||
| [`stack_llama/supervised_finetuning.py`](https://github.com/huggingface/trl/blob/main/examples/research_projects/stack_llama/scripts/supervised_finetuning.py) | SFT | Distributed instruction/supervised fine-tuning of the 7b parameter LLaMA model with `peft`. | |
|
||||
|
||||
## Installation
|
||||
|
||||
Note: peft is in active development, so we install directly from their Github page.
|
||||
Peft also relies on the latest version of transformers.
|
||||
|
||||
@ -47,7 +48,9 @@ model = AutoModelForCausalLMWithValueHead.from_pretrained(
|
||||
peft_config=lora_config,
|
||||
)
|
||||
```
|
||||
|
||||
And if you want to load your model in 8bit precision:
|
||||
|
||||
```python
|
||||
pretrained_model = AutoModelForCausalLMWithValueHead.from_pretrained(
|
||||
config.model_name,
|
||||
@ -55,7 +58,9 @@ pretrained_model = AutoModelForCausalLMWithValueHead.from_pretrained(
|
||||
peft_config=lora_config,
|
||||
)
|
||||
```
|
||||
|
||||
... or in 4bit precision:
|
||||
|
||||
```python
|
||||
pretrained_model = AutoModelForCausalLMWithValueHead.from_pretrained(
|
||||
config.model_name,
|
||||
@ -64,7 +69,6 @@ pretrained_model = AutoModelForCausalLMWithValueHead.from_pretrained(
|
||||
)
|
||||
```
|
||||
|
||||
|
||||
## Launch scripts
|
||||
|
||||
The `trl` library is powered by `accelerate`. As such it is best to configure and launch trainings with the following commands:
|
||||
@ -77,6 +81,7 @@ accelerate launch examples/scripts/ppo.py --use_peft # launch`es training
|
||||
## Using `trl` + `peft` and Data Parallelism
|
||||
|
||||
You can scale up to as many GPUs as you want, as long as you are able to fit the training process in a single device. The only tweak you need to apply is to load the model as follows:
|
||||
|
||||
```python
|
||||
from peft import LoraConfig
|
||||
...
|
||||
@ -94,7 +99,9 @@ pretrained_model = AutoModelForCausalLMWithValueHead.from_pretrained(
|
||||
peft_config=lora_config,
|
||||
)
|
||||
```
|
||||
|
||||
And if you want to load your model in 8bit precision:
|
||||
|
||||
```python
|
||||
pretrained_model = AutoModelForCausalLMWithValueHead.from_pretrained(
|
||||
config.model_name,
|
||||
@ -102,7 +109,9 @@ pretrained_model = AutoModelForCausalLMWithValueHead.from_pretrained(
|
||||
load_in_8bit=True,
|
||||
)
|
||||
```
|
||||
|
||||
... or in 4bit precision:
|
||||
|
||||
```python
|
||||
pretrained_model = AutoModelForCausalLMWithValueHead.from_pretrained(
|
||||
config.model_name,
|
||||
@ -110,6 +119,7 @@ pretrained_model = AutoModelForCausalLMWithValueHead.from_pretrained(
|
||||
load_in_4bit=True,
|
||||
)
|
||||
```
|
||||
|
||||
Finally, make sure that the rewards are computed on correct device as well, for that you can use `ppo_trainer.model.current_device`.
|
||||
|
||||
## Naive pipeline parallelism (NPP) for large models (>60B models)
|
||||
@ -117,9 +127,7 @@ Finally, make sure that the rewards are computed on correct device as well, for
|
||||
The `trl` library also supports naive pipeline parallelism (NPP) for large models (>60B models). This is a simple way to parallelize the model across multiple GPUs.
|
||||
This paradigm, termed as "Naive Pipeline Parallelism" (NPP) is a simple way to parallelize the model across multiple GPUs. We load the model and the adapters across multiple GPUs and the activations and gradients will be naively communicated across the GPUs. This supports `int8` models as well as other `dtype` models.
|
||||
|
||||
<div style="text-align: center">
|
||||
<img src="https://huggingface.co/datasets/trl-lib/documentation-images/resolve/main/trl-npp.png">
|
||||
</div>
|
||||

|
||||
|
||||
### How to use NPP?
|
||||
|
||||
|
||||
@ -1,10 +1,11 @@
|
||||
# PPO Trainer
|
||||
|
||||
[](https://huggingface.co/models?other=ppo,trl)
|
||||
[](https://huggingface.co/models?other=ppo,trl)
|
||||
|
||||
TRL supports training LLMs with [Proximal Policy Optimization (PPO)](https://huggingface.co/papers/1707.06347).
|
||||
|
||||
References:
|
||||
|
||||
- [Fine-Tuning Language Models from Human Preferences](https://github.com/openai/lm-human-preferences)
|
||||
- [Learning to Summarize from Human Feedback](https://github.com/openai/summarize-from-feedback)
|
||||
- [The N Implementation Details of RLHF with PPO](https://huggingface.co/blog/the_n_implementation_details_of_rlhf_with_ppo)
|
||||
@ -31,49 +32,45 @@ python examples/scripts/ppo/ppo.py \
|
||||
--missing_eos_penalty 1.0
|
||||
```
|
||||
|
||||
|
||||
## Explanation of the logged metrics
|
||||
|
||||
The logged metrics are as follows. Here is an example [tracked run at Weights and Biases](https://wandb.ai/huggingface/trl/runs/dd2o3g35)
|
||||
|
||||
* `eps`: Tracks the number of episodes per second.
|
||||
* `objective/kl`: The mean Kullback-Leibler (KL) divergence between the current policy and reference policy.
|
||||
* `objective/entropy`: The mean entropy of the policy, indicating the randomness of the actions chosen by the policy.
|
||||
* `objective/non_score_reward`: The mean reward from non-score-related sources, basically `beta * kl.sum(1)`, where `beta` is the KL penalty coefficient and `kl` is the per-token KL divergence.
|
||||
* `objective/rlhf_reward`: The mean RLHF reward, which is `score - non_score_reward`.
|
||||
* `objective/scores`: The mean scores returned by the reward model / environment.
|
||||
* `policy/approxkl_avg`: The average approximate KL divergence between consecutive PPO policies. Note that this is not the same as `objective/kl`.
|
||||
* `policy/clipfrac_avg`: The average fraction of policy updates that are clipped, indicating how often the policy updates are constrained to prevent large changes.
|
||||
* `loss/policy_avg`: The average policy loss, indicating how well the policy is performing.
|
||||
* `loss/value_avg`: The average value loss, indicating the difference between the predicted value and the actual reward.
|
||||
* `val/clipfrac_avg`: The average fraction of value function updates that are clipped, similar to policy/clipfrac_avg but for the value function.
|
||||
* `policy/entropy_avg`: The average entropy of the policy during training, indicating how diverse the policy's actions are.
|
||||
* `val/ratio`: The mean ratio of the current policy probability to the old policy probability, providing a measure of how much the policy has changed.
|
||||
* `val/ratio_var`: The variance of the `val/ratio`, indicating the variability in policy changes.
|
||||
* `val/num_eos_tokens`: The number of end-of-sequence (EOS) tokens generated, which can indicate the number of complete responses.
|
||||
* `lr`: lr: The current learning rate used by the optimizer.
|
||||
* `episode`: episode: The current episode count in the training process.
|
||||
|
||||
- `eps`: Tracks the number of episodes per second.
|
||||
- `objective/kl`: The mean Kullback-Leibler (KL) divergence between the current policy and reference policy.
|
||||
- `objective/entropy`: The mean entropy of the policy, indicating the randomness of the actions chosen by the policy.
|
||||
- `objective/non_score_reward`: The mean reward from non-score-related sources, basically `beta * kl.sum(1)`, where `beta` is the KL penalty coefficient and `kl` is the per-token KL divergence.
|
||||
- `objective/rlhf_reward`: The mean RLHF reward, which is `score - non_score_reward`.
|
||||
- `objective/scores`: The mean scores returned by the reward model / environment.
|
||||
- `policy/approxkl_avg`: The average approximate KL divergence between consecutive PPO policies. Note that this is not the same as `objective/kl`.
|
||||
- `policy/clipfrac_avg`: The average fraction of policy updates that are clipped, indicating how often the policy updates are constrained to prevent large changes.
|
||||
- `loss/policy_avg`: The average policy loss, indicating how well the policy is performing.
|
||||
- `loss/value_avg`: The average value loss, indicating the difference between the predicted value and the actual reward.
|
||||
- `val/clipfrac_avg`: The average fraction of value function updates that are clipped, similar to policy/clipfrac_avg but for the value function.
|
||||
- `policy/entropy_avg`: The average entropy of the policy during training, indicating how diverse the policy's actions are.
|
||||
- `val/ratio`: The mean ratio of the current policy probability to the old policy probability, providing a measure of how much the policy has changed.
|
||||
- `val/ratio_var`: The variance of the `val/ratio`, indicating the variability in policy changes.
|
||||
- `val/num_eos_tokens`: The number of end-of-sequence (EOS) tokens generated, which can indicate the number of complete responses.
|
||||
- `lr`: lr: The current learning rate used by the optimizer.
|
||||
- `episode`: episode: The current episode count in the training process.
|
||||
|
||||
## Cookbook
|
||||
|
||||
* Debugging TIP: `objective/rlhf_reward`: this is the ultimate objective of the RLHF training. If training works as intended, this metric should keep going up.
|
||||
* Debugging TIP: `val/ratio`: this number should float around 1.0, and it gets clipped by `--cliprange 0.2` with PPO's surrogate loss. So if this `ratio` is too high like 2.0 or 1000.0 or too small like 0.1, it means the updates between consecutive policies are too drastic. You should try understand why this is happening and try to fix it.
|
||||
* Memory TIP: If you are running out of memory, you can try to reduce the `--per_device_train_batch_size` or increase the `--gradient_accumulation_steps` to reduce the memory footprint.
|
||||
* Memory TIP: If you have multiple GPUs, you can also run training with DeepSpeed stage 3 to reduce the memory footprint `accelerate launch --config_file examples/accelerate_configs/deepspeed_zero3.yaml`.
|
||||
* Usage TIP: We recommend to use the "EOS trick" via `--missing_eos_penalty`, which subtracts a static scalar penalty from the score of completions that do not end with an EOS token. This can help the model learn to generate more coherent completions.
|
||||
|
||||
- Debugging TIP: `objective/rlhf_reward`: this is the ultimate objective of the RLHF training. If training works as intended, this metric should keep going up.
|
||||
- Debugging TIP: `val/ratio`: this number should float around 1.0, and it gets clipped by `--cliprange 0.2` with PPO's surrogate loss. So if this `ratio` is too high like 2.0 or 1000.0 or too small like 0.1, it means the updates between consecutive policies are too drastic. You should try understand why this is happening and try to fix it.
|
||||
- Memory TIP: If you are running out of memory, you can try to reduce the `--per_device_train_batch_size` or increase the `--gradient_accumulation_steps` to reduce the memory footprint.
|
||||
- Memory TIP: If you have multiple GPUs, you can also run training with DeepSpeed stage 3 to reduce the memory footprint `accelerate launch --config_file examples/accelerate_configs/deepspeed_zero3.yaml`.
|
||||
- Usage TIP: We recommend to use the "EOS trick" via `--missing_eos_penalty`, which subtracts a static scalar penalty from the score of completions that do not end with an EOS token. This can help the model learn to generate more coherent completions.
|
||||
|
||||
## What is my model doing exactly?
|
||||
|
||||
To help you understand what your model is doing, we periodically log some sample completions from the model. Here is an example of a completion. In an example [tracked run at Weights and Biases](https://wandb.ai/huggingface/trl/runs/dd2o3g35), it looks like the following, allowing you to see the model's response at different stages of training. By default we generate `--num_sample_generations 10` during training, but you can customize the number of generations.
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
In the logs the sampled generations look like
|
||||
|
||||
```
|
||||
```txt
|
||||
┏━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┳━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┳━━━━━━━━━━┓
|
||||
┃ query ┃ model response ┃ score ┃
|
||||
┡━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━╇━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━╇━━━━━━━━━━┩
|
||||
@ -177,7 +174,7 @@ This PPO implementation is based on the [The N+ Implementation Details of RLHF w
|
||||
|
||||
To validate the PPO implementation works, we ran experiment on the 1B model. Here are the command we used to run the experiment. We take the SFT / RM models directly from [The N+ Implementation Details of RLHF with PPO: A Case Study on TL;DR Summarization](https://huggingface.co/papers/2403.17031).
|
||||
|
||||
```
|
||||
```shell
|
||||
accelerate launch --config_file examples/accelerate_configs/deepspeed_zero2.yaml \
|
||||
examples/scripts/ppo/ppo_tldr.py \
|
||||
--output_dir models/minimal/ppo_tldr \
|
||||
@ -212,8 +209,7 @@ The PPO checkpoint gets a 64.7% preferred rate vs the 33.0% preference rate of t
|
||||
|
||||
Metrics:
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
```bash
|
||||
# pip install openrlbenchmark==0.2.1a5
|
||||
|
||||
@ -1,6 +1,6 @@
|
||||
# PRM Trainer
|
||||
|
||||
[](https://huggingface.co/models?other=prm,trl)
|
||||
[](https://huggingface.co/models?other=prm,trl)
|
||||
|
||||
> [!WARNING]
|
||||
> PRM Trainer is an experimental API which is subject to change at any time.
|
||||
@ -15,7 +15,6 @@ The abstract from the paper is the following:
|
||||
|
||||
This post-training method was contributed by [Gaetan Lopez](https://github.com/gaetanlop), [Lewis Tunstall](https://huggingface.co/lewtun), [Quentin Gallouédec](https://huggingface.co/qgallouedec) and [Agustín Piqueres](https://huggingface.co/plaguss).
|
||||
|
||||
|
||||
## Quick start
|
||||
|
||||
This example demonstrates how to train a model using the PRM method. We use the [Qwen 0.5B model](https://huggingface.co/Qwen/Qwen2-0.5B) as the base model. We use the stepwise supervision data from the [Math Shepherd dataset](https://huggingface.co/datasets/trl-lib/math_shepherd). You can view the data in the dataset here:
|
||||
@ -54,7 +53,6 @@ Distributed across 8 GPUs, the training takes approximately 1 hour.
|
||||
|
||||
To see how the [trained model](https://huggingface.co/trl-lib/Qwen2-0.5B-Reward-Math-Sheperd) performs, you can use the following script.
|
||||
|
||||
|
||||
```python
|
||||
from datasets import load_dataset
|
||||
from transformers import pipeline
|
||||
|
||||
@ -7,9 +7,7 @@
|
||||
|
||||
Sequence lengths in the dataset can vary widely. When data is batched, sequences are padded to match the longest one in the batch, which can cause high memory usage, even if most sequences are relatively short.
|
||||
|
||||
<div class="flex justify-center">
|
||||
<img src="https://huggingface.co/datasets/trl-lib/documentation-images/resolve/main/why_you_should_truncate.png" alt="Truncation prompt-completion" width="600"/>
|
||||
</div>
|
||||

|
||||
|
||||
To reduce memory usage, it's important to truncate sequences to a reasonable length. While TRL trainers truncate sequences by default, you may want to adjust the default truncation length to better align with your specific use case.
|
||||
|
||||
@ -18,9 +16,7 @@ To reduce memory usage, it's important to truncate sequences to a reasonable len
|
||||
|
||||
DPO truncation is applied first to the prompt and to the completion via the `max_prompt_length` and `max_completion_length` parameters. The `max_length` parameter is then used to truncate the resulting sequence.
|
||||
|
||||
<div class="flex justify-center">
|
||||
<img src="https://huggingface.co/datasets/trl-lib/documentation-images/resolve/main/truncation_prompt_completion.png" alt="DPO truncation" width="600"/>
|
||||
</div>
|
||||

|
||||
|
||||
To set the truncation parameters, use the following code snippet:
|
||||
|
||||
@ -43,9 +39,7 @@ training_args = DPOConfig(..., max_completion_length=...)
|
||||
|
||||
SFT truncation is applied to the input sequence via the `max_length` parameter.
|
||||
|
||||
<div class="flex justify-center">
|
||||
<img src="https://huggingface.co/datasets/trl-lib/documentation-images/resolve/main/truncation_input_ids.png" alt="Truncation input ids" width="600"/>
|
||||
</div>
|
||||

|
||||
|
||||
To set the truncation parameter, use the following code snippet:
|
||||
|
||||
@ -71,16 +65,14 @@ To help you choose an appropriate value, we provide a utility to visualize the s
|
||||
> [!TIP]
|
||||
> This technique applies only to SFT.
|
||||
|
||||
|
||||
[Truncation](#truncation) has several drawbacks:
|
||||
|
||||
1. **Loss of information**: Key data at the end of a sequence may be discarded.
|
||||
2. **Choosing truncation length**: Too short loses data; too long undermines efficiency.
|
||||
|
||||
Packing, introduced in [Raffel et al., 2020](https://huggingface.co/papers/1910.10683), addresses these issues by grouping sequences instead of truncating. It concatenates and splits dataset sequences into the desired lengths.
|
||||
|
||||
<div class="flex justify-center">
|
||||
<img src="https://huggingface.co/datasets/trl-lib/documentation-images/resolve/main/packing_2.png" alt="Packing" width="600"/>
|
||||
</div>
|
||||

|
||||
|
||||
Packing reduces padding by merging several sequences in one row when possible. We use an advanced method to be near-optimal in the way we pack the dataset. To enable packing, use `packing=True` in the [`SFTConfig`].
|
||||
|
||||
@ -142,9 +134,7 @@ training_args = KTOConfig(..., use_liger_loss=True)
|
||||
|
||||
Padding-free batching is an alternative approach for reducing memory usage. In this method, a batch is first sampled and then flattened into a single sequence, avoiding padding. Unlike packing, which can result in incomplete sequences by combining parts of different samples, padding-free batching ensures that all sequences remain complete and intact.
|
||||
|
||||
<div class="flex justify-center">
|
||||
<img src="https://huggingface.co/datasets/trl-lib/documentation-images/resolve/main/padding-free.png" alt="Padding-free batching" width="600"/>
|
||||
</div>
|
||||

|
||||
|
||||
> [!WARNING]
|
||||
> It's highly recommended to use padding-free batching with **FlashAttention 2** or **FlashAttention 3**. Otherwise, you may encounter batch contamination issues.
|
||||
|
||||
@ -1,6 +1,6 @@
|
||||
# Reward Modeling
|
||||
|
||||
[](https://huggingface.co/models?other=reward-trainer,trl)
|
||||
[](https://huggingface.co/models?other=reward-trainer,trl)
|
||||
|
||||
## Overview
|
||||
|
||||
|
||||
@ -1,6 +1,6 @@
|
||||
# RLOO Trainer
|
||||
|
||||
[](https://huggingface.co/models?other=rloo,trl)
|
||||
[](https://huggingface.co/models?other=rloo,trl)
|
||||
|
||||
## Overview
|
||||
|
||||
@ -108,7 +108,6 @@ $$
|
||||
b_i = \frac{1}{G-1} \sum_{j \neq i} r_j
|
||||
$$
|
||||
|
||||
|
||||
and then the advantage for each completion is computed as the difference between its reward and the baseline:
|
||||
|
||||
$$
|
||||
@ -151,9 +150,9 @@ While training and evaluating, we record the following reward metrics:
|
||||
- `entropy`: Average entropy of token predictions across generated completions. (If `mask_truncated_completions=True`, masked sequences tokens are excluded.)
|
||||
- `kl`: The average KL divergence between the model and the reference model, calculated over generated completions. Logged only if `beta` is nonzero.
|
||||
- `clip_ratio/region_mean`: The ratio of sequence probabilities where the RLOO objective is clipped to stay within the trust region:
|
||||
$$
|
||||
\text{clip}\left( r_{i}(\theta), 1 - \epsilon_\mathrm{low}, 1 + \epsilon_\mathrm{high} \right)\,, \qquad r_{i}(\theta) = \frac{\pi_\theta(o_{i} \mid q)}{\pi_{\theta_{\text{old}}}(o_{i} \mid q)}\,.
|
||||
$$
|
||||
$$
|
||||
\text{clip}\left( r_{i}(\theta), 1 - \epsilon_\mathrm{low}, 1 + \epsilon_\mathrm{high} \right)\,, \qquad r_{i}(\theta) = \frac{\pi_\theta(o_{i} \mid q)}{\pi_{\theta_{\text{old}}}(o_{i} \mid q)}\,.
|
||||
$$
|
||||
|
||||
A higher value means more samples are clipped, which constrains how much the policy $\pi_\theta$ can change.
|
||||
- `clip_ratio/low_mean`: The average ratio of sequence probabilities that were clipped on the lower bound of the trust region: \\(r_{i,t}(\theta) < 1 - \epsilon_\mathrm{low}\\)
|
||||
@ -166,6 +165,7 @@ $$
|
||||
### Speed up training with vLLM-powered generation
|
||||
|
||||
Generation is often the main bottleneck when training with online methods. To accelerate generation, you can use [vLLM](https://github.com/vllm-project/vllm), a high-throughput, low-latency inference engine for LLMs. To enable it, first install the package with
|
||||
|
||||
```shell
|
||||
pip install trl[vllm]
|
||||
```
|
||||
@ -177,11 +177,13 @@ We support two ways of using vLLM during training: **server mode** and **colocat
|
||||
In this mode, vLLM runs in a separate process (and using separate GPUs) and communicates with the trainer via HTTP. This is ideal if you have dedicated GPUs for inference.
|
||||
|
||||
1. **Start the vLLM server**:
|
||||
|
||||
```bash
|
||||
trl vllm-serve --model <model_name>
|
||||
```
|
||||
|
||||
2. **Enable server mode in your training script**:
|
||||
|
||||
```python
|
||||
from trl import RLOOConfig
|
||||
|
||||
@ -214,12 +216,7 @@ training_args = RLOOConfig(
|
||||
>
|
||||
> We provide a [HF Space](https://huggingface.co/spaces/trl-lib/recommend-vllm-memory) to help estimate the recommended GPU memory utilization based on your model configuration and experiment settings. Simply use it as follows to get `vllm_gpu_memory_utilization` recommendation:
|
||||
>
|
||||
> <iframe
|
||||
> src="https://trl-lib-recommend-vllm-memory.hf.space"
|
||||
> frameborder="0"
|
||||
> width="850"
|
||||
> height="450"
|
||||
> ></iframe>
|
||||
> <iframe src="https://trl-lib-recommend-vllm-memory.hf.space" frameborder="0" width="850" height="450"></iframe>
|
||||
>
|
||||
> If the recommended value does not work in your environment, we suggest adding a small buffer (e.g., +0.05 or +0.1) to the recommended value to ensure stability.
|
||||
>
|
||||
@ -418,6 +415,7 @@ You can test this function as follows:
|
||||
>>> reward_func(prompts=prompts, completions=completions, ground_truth=ground_truth)
|
||||
[1.0, 0.0]
|
||||
```
|
||||
|
||||
#### Example 4: Multi-task reward functions
|
||||
|
||||
Below is an example of using multiple reward functions in the [`RLOOTrainer`]. In this example, we define two task-specific reward functions: `math_reward_func` and `coding_reward_func`. The `math_reward_func` rewards math problems based on their correctness, while the `coding_reward_func` rewards coding problems based on whether the solution works.
|
||||
@ -478,8 +476,6 @@ In this example, the `math_reward_func` and `coding_reward_func` are designed to
|
||||
|
||||
Note that the [`RLOOTrainer`] will ignore the `None` rewards returned by the reward functions and only consider the rewards returned by the relevant functions. This ensures that the model is trained on the relevant tasks and ignores the tasks for which there is no relevant reward function.
|
||||
|
||||
|
||||
|
||||
#### Passing the reward function to the trainer
|
||||
|
||||
To use your custom reward function, pass it to the [`RLOOTrainer`] as follows:
|
||||
|
||||
@ -4,15 +4,11 @@ The notebooks and scripts in these examples show how to fine-tune a model with a
|
||||
|
||||
Here's an overview of the notebooks and scripts in the [trl repository](https://github.com/huggingface/trl/tree/main/examples):
|
||||
|
||||
|
||||
|
||||
| File | Description |
|
||||
|------------------------------------------------------------------------------------------------------------|--------------------------------------------------------------------------------------------------------------------------|
|
||||
| --- |--- |
|
||||
| [`examples/scripts/ppo.py`](https://github.com/huggingface/trl/blob/main/examples/scripts/ppo.py) [](https://colab.research.google.com/github/huggingface/trl/blob/main/examples/sentiment/notebooks/gpt2-sentiment.ipynb) | This script shows how to use the `PPOTrainer` to fine-tune a sentiment analysis model using IMDB dataset |
|
||||
| [`examples/notebooks/gpt2-sentiment.ipynb`](https://github.com/huggingface/trl/tree/main/examples/notebooks/gpt2-sentiment.ipynb) | This notebook demonstrates how to reproduce the GPT2 imdb sentiment tuning example on a jupyter notebook. |
|
||||
| [`examples/notebooks/gpt2-control.ipynb`](https://github.com/huggingface/trl/tree/main/examples/notebooks/gpt2-control.ipynb) [](https://colab.research.google.com/github/huggingface/trl/blob/main/examples/sentiment/notebooks/gpt2-sentiment-control.ipynb) | This notebook demonstrates how to reproduce the GPT2 sentiment control example on a jupyter notebook.
|
||||
|
||||
|
||||
| [`examples/notebooks/gpt2-control.ipynb`](https://github.com/huggingface/trl/tree/main/examples/notebooks/gpt2-control.ipynb) [](https://colab.research.google.com/github/huggingface/trl/blob/main/examples/sentiment/notebooks/gpt2-sentiment-control.ipynb) | This notebook demonstrates how to reproduce the GPT2 sentiment control example on a jupyter notebook. |
|
||||
|
||||
## Usage
|
||||
|
||||
@ -30,7 +26,6 @@ python examples/scripts/ppo.py --log_with wandb --mini_batch_size 1 --gradient_a
|
||||
|
||||
Note: if you don't want to log with `wandb` remove `log_with="wandb"` in the scripts/notebooks. You can also replace it with your favourite experiment tracker that's [supported by `accelerate`](https://huggingface.co/docs/accelerate/usage_guides/tracking).
|
||||
|
||||
|
||||
## Few notes on multi-GPU
|
||||
|
||||
To run in multi-GPU setup with DDP (distributed Data Parallel) change the `device_map` value to `device_map={"": Accelerator().process_index}` and make sure to run your script with `accelerate launch yourscript.py`. If you want to apply naive pipeline parallelism you can use `device_map="auto"`.
|
||||
@ -106,7 +106,6 @@ $$
|
||||
where \\( y_t \\) is the target token at timestep \\( t \\), and the model is trained to predict the next token given the previous ones. In practice, padding tokens are masked out during loss computation.
|
||||
|
||||
> [!TIP]
|
||||
>
|
||||
> [On the Generalization of SFT: A Reinforcement Learning Perspective with Reward Rectification](https://huggingface.co/papers/2508.05629) proposes an alternative loss function, called **Dynamic Fine-Tuning (DFT)**, which aims to improve generalization by rectifying the reward signal. This method can be enabled by setting `loss_type="dft"` in the [`SFTConfig`]. For more details, see [Paper Index - Dynamic Fine-Tuning](paper_index#on-the-generalization-of-sft-a-reinforcement-learning-perspective-with-reward-rectification).
|
||||
|
||||
### Label shifting and masking
|
||||
|
||||
@ -48,11 +48,13 @@ You can customize the server configuration by passing additional arguments. For
|
||||
> When using vLLM, ensure that the GPUs assigned for training and generation are separate to avoid resource conflicts. For instance, if you plan to use 4 GPUs for training and another 4 for vLLM generation, you can specify GPU allocation using `CUDA_VISIBLE_DEVICES`.
|
||||
>
|
||||
> Set GPUs **0-3** for vLLM generation:
|
||||
>
|
||||
> ```sh
|
||||
> CUDA_VISIBLE_DEVICES=0,1,2,3 trl vllm-serve --model <model_name>
|
||||
> ```
|
||||
>
|
||||
> And GPUs **4-7** for training:
|
||||
>
|
||||
> ```sh
|
||||
> CUDA_VISIBLE_DEVICES=4,5,6,7 accelerate launch train.py
|
||||
> ```
|
||||
@ -80,11 +82,13 @@ You can customize the server configuration by passing additional arguments. For
|
||||
> When using vLLM, ensure that the GPUs assigned for training and generation are separate to avoid resource conflicts. For instance, if you plan to use 4 GPUs for training and another 4 for vLLM generation, you can specify GPU allocation using `CUDA_VISIBLE_DEVICES`.
|
||||
>
|
||||
> Set GPUs **0-3** for vLLM generation:
|
||||
>
|
||||
> ```sh
|
||||
> CUDA_VISIBLE_DEVICES=0,1,2,3 trl vllm-serve --model <model_name>
|
||||
> ```
|
||||
>
|
||||
> And GPUs **4-7** for training:
|
||||
>
|
||||
> ```sh
|
||||
> CUDA_VISIBLE_DEVICES=4,5,6,7 accelerate launch train.py
|
||||
> ```
|
||||
|
||||
@ -43,7 +43,6 @@ To use the data efficiently, we use a technique called packing: instead of havin
|
||||
With this approach the training is much more efficient as each token that is passed through the model is also trained in contrast to padding tokens which are usually masked from the loss.
|
||||
If you don't have much data and are more concerned about occasionally cutting off some tokens that are overflowing the context you can also use a classical data loader.
|
||||
|
||||
|
||||
```python
|
||||
# load model in 8bit
|
||||
model = AutoModelForCausalLM.from_pretrained(
|
||||
@ -109,6 +108,7 @@ peft_config = LoraConfig(
|
||||
lora_dropout=0.1,
|
||||
)
|
||||
```
|
||||
|
||||
As detailed in the next section, the resulting adapter can be merged into the frozen model and saved for further downstream use.
|
||||
|
||||
## Reinforcement Learning from Human Feedback
|
||||
|
||||
@ -14,7 +14,6 @@ This document will guide you through the process of using vLLM with TRL for fast
|
||||
> - [`XPOTrainer`]
|
||||
> - [`RLOOTrainer`]
|
||||
|
||||
|
||||
## 🚀 How can I use vLLM with TRL to speed up training?
|
||||
|
||||
💡 **Note**: Resources required for this specific example: a single node with 8 GPUs.
|
||||
@ -235,16 +234,16 @@ Separately, the number of completions to generate per prompt is controlled by th
|
||||
|
||||
### 🥸 More detail on what happens under the hood when running the server
|
||||
|
||||
* The vLLM server starts by running the command: `trl vllm-serve --model Qwen/Qwen2.5-7B`.
|
||||
* Once the server is running, it generates completions based on requests from the client (trainer) using `vllm_client.generate` [here](https://github.com/huggingface/trl/blob/cc044e35b285be7dc062764b3364e1e684db4c7c/trl/trainer/grpo_trainer.py#L1025-L1035).
|
||||
* The client (trainer) then requests these completions from the server.
|
||||
* These completions are used to compute the reward signal.
|
||||
* Based on the reward signal and the model’s output, the loss is computed, and the backward pass is performed to update the model’s weights.
|
||||
* **Note**: The server only handles completion generation — it doesn’t train the model. Therefore, the model’s weights aren’t updated on the server. Once the backward pass is complete, the client sends the updated weights to the server using `vllm_client.update_named_param(name, param.data)`.
|
||||
- The vLLM server starts by running the command: `trl vllm-serve --model Qwen/Qwen2.5-7B`.
|
||||
- Once the server is running, it generates completions based on requests from the client (trainer) using `vllm_client.generate` [these lines](https://github.com/huggingface/trl/blob/cc044e35b285be7dc062764b3364e1e684db4c7c/trl/trainer/grpo_trainer.py#L1025-L1035).
|
||||
- The client (trainer) then requests these completions from the server.
|
||||
- These completions are used to compute the reward signal.
|
||||
- Based on the reward signal and the model’s output, the loss is computed, and the backward pass is performed to update the model’s weights.
|
||||
- **Note**: The server only handles completion generation — it doesn’t train the model. Therefore, the model’s weights aren’t updated on the server. Once the backward pass is complete, the client sends the updated weights to the server using `vllm_client.update_named_param(name, param.data)`.
|
||||
|
||||
When using vLLM, ensure the GPUs assigned for training and generation are separate to avoid NCCL communication conflicts. If you do not set the `CUDA_VISIBLE_DEVICES` environment variable, the training script will use all available GPUs by default, which may lead to device conflicts. Starting from TRL next release after v0.19.1, the code automatically detects and prevents same-device usage, raising a error at the vllm server process:
|
||||
|
||||
```
|
||||
```log
|
||||
RuntimeError: Attempting to use the same CUDA device for multiple distinct roles/ranks within the same communicator.
|
||||
Ensure that trainer is using different devices than vLLM server.
|
||||
```
|
||||
@ -307,23 +306,23 @@ options:
|
||||
|
||||
### 💆🏻♀️ What's the best distributed setup?
|
||||
|
||||

|
||||

|
||||

|
||||

|
||||
|
||||
First and foremost, always remember that the optimal setup depends on:
|
||||
|
||||
* The model size
|
||||
* The number of GPUs you have
|
||||
* The GPU memory size
|
||||
* The batch size you are using
|
||||
* The number of requests you are sending to the server (prompts)
|
||||
* The `max_model_len` you are using (this is the max length of the input sequence that the model can process, a.k.a. the context window size)
|
||||
* The number of completions you are generating for each request (`num_generations`)
|
||||
- The model size
|
||||
- The number of GPUs you have
|
||||
- The GPU memory size
|
||||
- The batch size you are using
|
||||
- The number of requests you are sending to the server (prompts)
|
||||
- The `max_model_len` you are using (this is the max length of the input sequence that the model can process, a.k.a. the context window size)
|
||||
- The number of completions you are generating for each request (`num_generations`)
|
||||
|
||||
Given these factors, our experiments on the Qwen model family (3B, 7B, 14B, 32B) using 8 H100 GPUs show that:
|
||||
|
||||
* For reasonable-sized models (3B–14B) and a moderate context window (`max_len < 8k`), using full capacity for data parallelism gives better throughput. The setup `(tp=1, dp=8)` yields the best results.
|
||||
* For larger models (32B) and longer context windows (`max_len > 8k`), a smaller DP size combined with some model-side parallelism performs better. For example, `(tp=2, dp=4)` is a good setup for 32B models with a larger context window.
|
||||
- For reasonable-sized models (3B–14B) and a moderate context window (`max_len < 8k`), using full capacity for data parallelism gives better throughput. The setup `(tp=1, dp=8)` yields the best results.
|
||||
- For larger models (32B) and longer context windows (`max_len > 8k`), a smaller DP size combined with some model-side parallelism performs better. For example, `(tp=2, dp=4)` is a good setup for 32B models with a larger context window.
|
||||
|
||||
### vLLM with Transformers Backend
|
||||
|
||||
@ -334,7 +333,7 @@ For more details, check out [vLLM Transformers Backend](https://blog.vllm.ai/202
|
||||
|
||||
Example:
|
||||
|
||||
```
|
||||
```sh
|
||||
CUDA_DEVICE_ORDER=PCI_BUS_ID CUDA_VISIBLE_DEVICES=0 trl vllm-serve --model Qwen/Qwen
|
||||
2.5-VL-3B-Instruct --tensor-parallel-size 1 --port 8000 --enforce_eager --vllm_model_impl transformers
|
||||
```
|
||||
@ -496,7 +495,5 @@ training_args = RLOOConfig(
|
||||
> [!WARNING]
|
||||
> Check the documentation of the trainer you are using for specific details on vLLM usage and parameters.
|
||||
|
||||
|
||||
> [!WARNING]
|
||||
> To reduce GPU memory usage when running vLLM, consider [enabling vLLM sleep mode](reducing_memory_usage#vllm-sleep-mode).
|
||||
|
||||
|
||||
@ -1,6 +1,6 @@
|
||||
# XPO Trainer
|
||||
|
||||
[](https://huggingface.co/models?other=xpo,trl)
|
||||
[](https://huggingface.co/models?other=xpo,trl)
|
||||
|
||||
## Overview
|
||||
|
||||
@ -148,7 +148,6 @@ While training and evaluating we record the following reward metrics:
|
||||
* `alpha`: The weight of the XPO loss term. Typically fixed, but can be made dynamic by passing a list to [`XPOConfig`].
|
||||
* `beta`: The parameter that controls the weight of the loss term representing the deviation from the reference model. Typically fixed, but can be made dynamic by passing a list to [`XPOConfig`].
|
||||
|
||||
|
||||
## XPOTrainer
|
||||
|
||||
[[autodoc]] XPOTrainer
|
||||
|
||||
@ -4,21 +4,23 @@
|
||||
|
||||
Install all the dependencies in the `requirements.txt`:
|
||||
|
||||
```
|
||||
$ pip install -U -r requirements.txt
|
||||
```shell
|
||||
pip install -U -r requirements.txt
|
||||
```
|
||||
|
||||
Since we will use `accelerate` for training, make sure to run:
|
||||
```
|
||||
$ accelerate config
|
||||
|
||||
```shell
|
||||
accelerate config
|
||||
```
|
||||
|
||||
## Training
|
||||
|
||||
There were two main steps to the DPO training process:
|
||||
|
||||
1. Supervised fine-tuning of the base llama-v2-7b model to create llama-v2-7b-se:
|
||||
|
||||
```
|
||||
```shell
|
||||
accelerate launch examples/research_projects/stack_llama_2/scripts/sft_llama2.py \
|
||||
--output_dir="./sft" \
|
||||
--max_steps=500 \
|
||||
@ -38,19 +40,20 @@ There were two main steps to the DPO training process:
|
||||
--run_name="sft_llama2" \
|
||||
--report_to="wandb"
|
||||
```
|
||||
1. Run the DPO trainer using the model saved by the previous step:
|
||||
```
|
||||
|
||||
2. Run the DPO trainer using the model saved by the previous step:
|
||||
|
||||
```shell
|
||||
accelerate launch examples/research_projects/stack_llama_2/scripts/dpo_llama2.py \
|
||||
--model_name_or_path="sft/final_checkpoint" \
|
||||
--output_dir="dpo"
|
||||
```
|
||||
|
||||
|
||||
## Merging the adaptors
|
||||
|
||||
To merge the adaptors into the base model we can use the `merge_peft_adapter.py` helper script that comes with TRL:
|
||||
|
||||
```
|
||||
```shell
|
||||
python examples/research_projects/stack_llama/scripts/merge_peft_adapter.py --base_model_name="meta-llama/Llama-2-7b-hf" --adapter_model_name="dpo/final_checkpoint/" --output_name="stack-llama-2"
|
||||
```
|
||||
|
||||
@ -60,7 +63,7 @@ which will also push the model to your HuggingFace hub account.
|
||||
|
||||
We can load the DPO-trained LoRA adaptors which were saved by the DPO training step and load them via:
|
||||
|
||||
```py
|
||||
```python
|
||||
from peft import AutoPeftModelForCausalLM
|
||||
|
||||
|
||||
|
||||
Reference in New Issue
Block a user