mirror of
https://github.com/pytorch/pytorch.git
synced 2025-10-21 05:34:18 +08:00
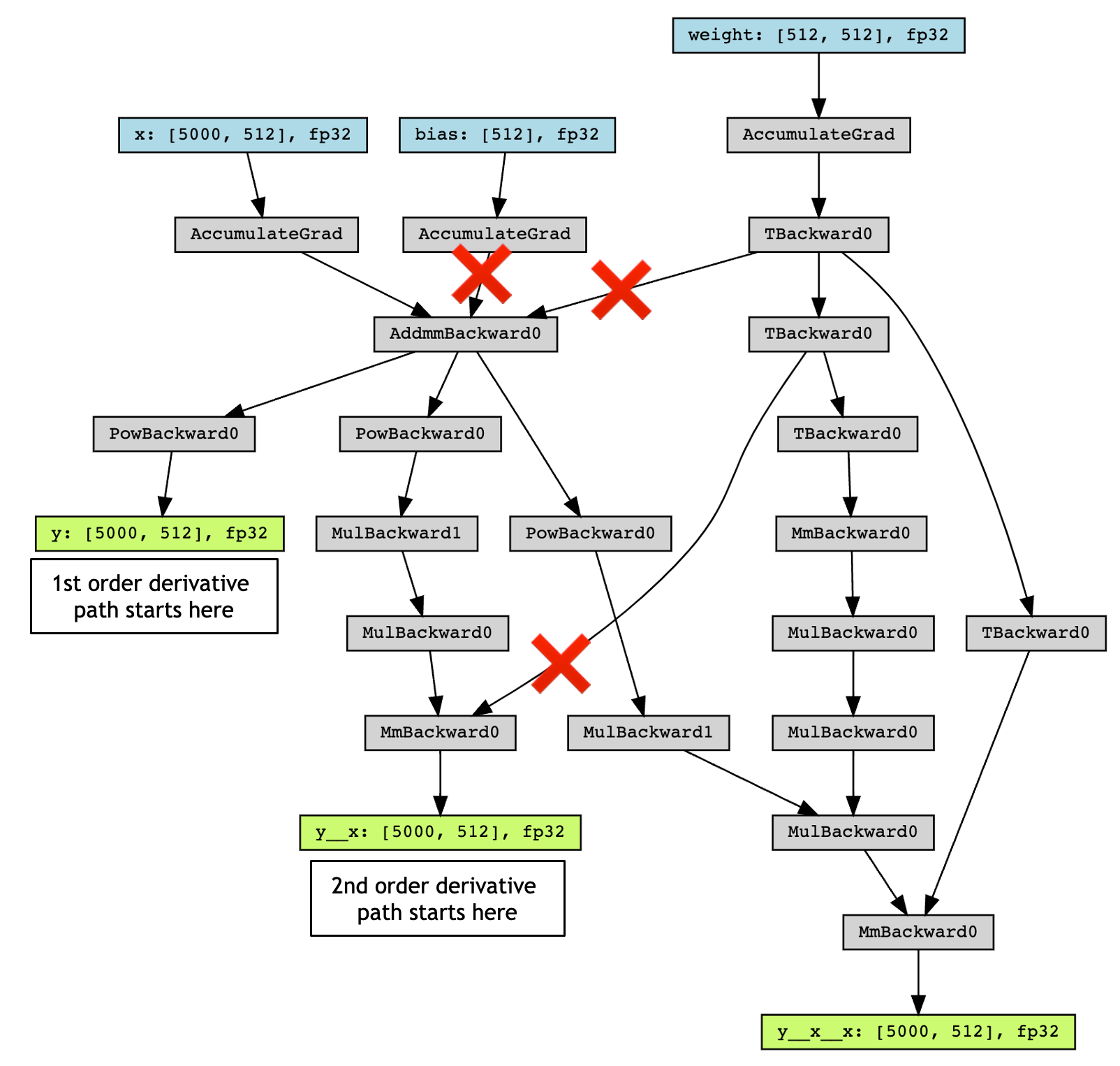
### Introduction <!-- What did you change and why was it needed? --> Removing unnecessary weight gradient calculation is very important for applications that need high-order derivatives during training. However, this is not supported by the current Autograd engine. For more detail: The backward function of a `matmul` operator (e.g., `linear` `addmm` `mm`), has two matmuls, one for `input gradient` and another for `weight gradient`. For a typical neural network (nn) with a few linear layers and activation functions, if the user calls `torch.autograd.grad()` to calculate the derivative of the nn output `y` w.r.t the nn input `x`, only the `input gradient` of the `matmul` operator is needed, and the `weight gradient` is discarded. However, the current PyTorch autograd engine will always calculate the `weight gradient` if `weight` requires gradient (the calculation of the high-order derivative is performed during training). The figure attached shows the autograd graph of the following code snippet: ```py y = torch.nn.functional.linear(x, weight, bias) y = y.pow(2) # first order derivative y__x, = torch.autograd.grad(y, x, grad_outputs=grad_outputs, create_graph=True) # first order derivative y__x__x, = torch.autograd.grad(y__x, x, grad_outputs=grad_outputs, create_graph=True) ``` The path with ❌ is not needed when calculating derivatives. <img width="50%" alt="image" src="https://user-images.githubusercontent.com/9999318/182018117-719c5a23-bcc6-4a63-8e8d-1bca3ebda2e3.png"> ### Issue <!-- Link to Issue ticket or RFP --> Related issue: https://github.com/pytorch/pytorch/issues/56500 ### Method When calling `torch.autograd.grad`, `exec_info_` is created for each GraphTask, which allows filtering paths on the graph that are not needed. However, when the GraphTask calls into the node, the node still does not know whether the edges are needed or not. In the case of matmul, `weight.requires_grad is True` so the weight gradient is always calculated. Following https://github.com/pytorch/pytorch/issues/56500#issuecomment-825694656, this PR passes the graph task's thread_local `exec_info_` into the node, so it could trim unnecessary edges during `torch.autograd.grad` calls. ### Benchmark Benchmark script: https://gist.github.com/yueyericardo/24158433a2021c51eeef9c3e2722df99 Benchmark result: 6 hidden layers, batch size 10000, on A100 FP32 result | hessian benchmark | FP32 (before) | FP32 (After) | FP32 (Functorch v0.1.1) | | ----------------------------- | ------------- | ----------------- | ----------------------- | | Linear + ReLU (no backward) | 55.658 ms | 29.392 ms (1.90X) | 29.547 ms (1.90X) | | Linear + ReLU (with backward) | 81.173 ms | 54.917 ms (1.47X) | 68.988 ms (1.18X) | TF32 result | hessian benchmark | TF32 (before) | TF32 (after) | TF32 (Functorch v0.1.1) | | ----------------------------- | ------------- | ----------------- | ----------------------- | | Linear + ReLU (no backward) | 19.801 ms | 11.259 ms (1.76X) | 10.754 ms (1.84X) | | Linear + ReLU (with backward) | 29.167 ms | 20.466 ms (1.42X) | 22.784 ms (1.28X) | For FP32 result, we could get 1.9X speed up for hessian calculation, and 1.47X speed up during training, which is even faster than functorch `vmap(jacfwd(jacrev` implementation. (functorch has performance regression on v0.2.0, https://github.com/pytorch/functorch/issues/989, so we are using v0.1.1 for benchmark) @zou3519 does functorch also includes similar optimizations during hessian calculation? If not, what do we need to do so the functorch could also benefit from this PR? ### Testing <!-- How did you test your change? --> - [x] we need to figure out a way for unittest ### Thanks Thanks for the great blog: [How Computational Graphs are Executed in PyTorch | PyTorch](https://pytorch.org/blog/how-computational-graphs-are-executed-in-pytorch/) cc @zasdfgbnm @albanD Pull Request resolved: https://github.com/pytorch/pytorch/pull/82544 Approved by: https://github.com/soulitzer
{kind=link}
1494 lines
55 KiB
C++
1494 lines
55 KiB
C++
#include <torch/csrc/autograd/engine.h>
|
|
|
|
#include <torch/csrc/autograd/anomaly_mode.h>
|
|
#include <torch/csrc/autograd/autograd.h>
|
|
#include <torch/csrc/autograd/function.h>
|
|
#include <torch/csrc/autograd/functions/basic_ops.h>
|
|
#include <torch/csrc/autograd/grad_mode.h>
|
|
#include <torch/csrc/autograd/variable.h>
|
|
#include <torch/csrc/utils/memory.h>
|
|
|
|
#include <ATen/DeviceGuard.h>
|
|
#include <ATen/ExpandUtils.h>
|
|
#include <ATen/Parallel.h>
|
|
#include <ATen/detail/CUDAHooksInterface.h>
|
|
|
|
#ifndef AT_PER_OPERATOR_HEADERS
|
|
#include <ATen/Functions.h>
|
|
#else
|
|
#include <ATen/ops/isnan.h>
|
|
#endif
|
|
|
|
#include <c10/core/DeviceGuard.h>
|
|
#include <c10/core/Event.h>
|
|
#include <c10/core/Stream.h>
|
|
#include <c10/core/StreamGuard.h>
|
|
#include <c10/util/Exception.h>
|
|
#include <c10/util/Optional.h>
|
|
#include <c10/util/ThreadLocal.h>
|
|
#include <c10/util/irange.h>
|
|
|
|
#include <atomic>
|
|
#include <chrono>
|
|
#include <condition_variable>
|
|
#include <cstdint>
|
|
#include <functional>
|
|
#include <iostream>
|
|
#include <memory>
|
|
#include <mutex>
|
|
#include <queue>
|
|
#include <set>
|
|
#include <sstream>
|
|
#include <string>
|
|
#include <thread>
|
|
#include <typeinfo>
|
|
#include <unordered_set>
|
|
|
|
namespace torch {
|
|
namespace autograd {
|
|
|
|
namespace {
|
|
static bool in_bad_autograd_fork =
|
|
false; // True for children forked after engine's thread pool init
|
|
|
|
// Called in the forked child if engine's thread pool has already been
|
|
// initialized
|
|
static void forked_autograd_child() {
|
|
in_bad_autograd_fork = true;
|
|
}
|
|
|
|
// Should be called before unsafe for forks (thread pool) calls
|
|
static void track_bad_autograd_forks() {
|
|
#if !defined(WIN32)
|
|
static c10::once_flag flag;
|
|
c10::call_once(
|
|
flag, [&] { pthread_atfork(nullptr, nullptr, forked_autograd_child); });
|
|
#endif
|
|
}
|
|
|
|
inline bool should_run_in_cpu_ready_queue(c10::DeviceType device) {
|
|
if (device == c10::kCPU || device == c10::kMeta || device == c10::kLazy) {
|
|
return true;
|
|
} else {
|
|
return false;
|
|
}
|
|
}
|
|
} // namespace
|
|
|
|
// Threads spawned by the engine are assigned a 'worker_device' specifying
|
|
// what device they process work for. This variable is initialized at:
|
|
// 1. thread creation time for CUDA, XLA device threads, as they are
|
|
// spinning threads waiting for works on their device.
|
|
// 2. before the graph task execution for CPU threads, as for each
|
|
// backward call we use the caller thread to drive engine execution.
|
|
// This is used when handling reentrant backwards calls;
|
|
// See Note [Reentrant backwards]
|
|
static thread_local int worker_device = NO_DEVICE;
|
|
|
|
// This variable is true if ALL invocations in the stack of re-entrant engine
|
|
// invocations are imperative backwards. This special variable is needed for the
|
|
// gradient checkpointing feature only.
|
|
static thread_local bool checkpoint_valid = true;
|
|
|
|
// Number of nested reentrant backwards calls currently on this thread
|
|
static thread_local int current_depth = 0;
|
|
|
|
// For all device threads (i.e. CUDA, XLA), total_depth represents the total
|
|
// nested
|
|
// reentrant backwards depths over all device threads.
|
|
// For CPU devices, it is the total depth associated with the original backward
|
|
// call.
|
|
static thread_local int total_depth = 0;
|
|
|
|
// The current GraphTask being executed by this thread. This helps
|
|
// queue_callback() to find the target GraphTask to append final callbacks.
|
|
C10_DEFINE_TLS_static(std::shared_ptr<GraphTask>, tls_current_graph_task);
|
|
#define current_graph_task (tls_current_graph_task.get())
|
|
|
|
// Every autograd worker thread is associated with a ready queue, which
|
|
// specifies the stream of work of this thread to do. This shared_ptr is a
|
|
// thread_local pointer to each thread's ready_queue, and it should be
|
|
// initialized via the Engine::init_local_ready_queue() call in each
|
|
// corresponding thread before execution.
|
|
//
|
|
// The CUDA, XLA threads are shared among all invocations of backwards via
|
|
// device_ready_queues_, while the caller thread is dedicated to processing work
|
|
// for devices returning true in should_run_in_cpu_ready_queue (most notably the
|
|
// CPU device). So any given graph task maintains its own cpu_ready_queue_ where
|
|
// you should send work for it to be done.
|
|
//
|
|
// For reentrant backward calls, if we spawn new thread from the current thread
|
|
// because we reached the maximum depth, the new thread will just reuse the same
|
|
// ReadyQueue with the parent thread for performance improvement.
|
|
// see Note [Reentrant backwards] for more details.
|
|
C10_DEFINE_TLS_static(std::shared_ptr<ReadyQueue>, tls_local_ready_queue);
|
|
#define local_ready_queue (tls_local_ready_queue.get())
|
|
|
|
// Note [Reentrant backwards]
|
|
// ~~~~~~~~~~~~~~~~~~~~~~~~~~
|
|
// To understand the reentrant backwards problem, we have to notice two
|
|
// aspects of how the autograd engine is implemented today:
|
|
//
|
|
// 1. When you call Engine::execute(), you want to block until
|
|
// differentiation finishes so that you can get the final result variables
|
|
// of the backwards pass.
|
|
//
|
|
// 2. The engine operates by having a single worker thread per work queue,
|
|
// and every work queue is pinned to a specific device where the
|
|
// operation is executed.
|
|
//
|
|
// The problem is, suppose that you call backward() inside of a worker
|
|
// thread. By property (1), we're supposed to block until the nested task
|
|
// finishes. However, by property (2), this worker thread is on the
|
|
// hook for processing the tasks assigned to it; we better not block,
|
|
// because then all of our backward executions (including the one we
|
|
// just started) will deadlock!
|
|
//
|
|
// We maintain a pool of threads waiting for work to do
|
|
// When a reentrant backwards call occurs, the current thread blocks
|
|
// and a thread from the pool is woken up to complete the blocking tasks and an
|
|
// any other tasks that would have been assigned to that worker. If there are no
|
|
// threads available, a new thread is spawned. The new thread will continue
|
|
// processing tasks from the same ReadyQueue as the parent worker
|
|
//
|
|
// When the GraphTask is finished, the parent worker thread that is waiting on
|
|
// the task is notified and the current thread returns to the pool.
|
|
|
|
// Note [Streaming backwards]
|
|
// ~~~~~~~~~~~~~~~~~~~~~~~~~~
|
|
// On CUDA devices the autograd engine's device operations are run on the
|
|
// same stream that ran them in forward. This requires automatically
|
|
// syncing the streams so that function A finishes producing its
|
|
// output before function B consumes it.
|
|
//
|
|
// This synchronization occurs when outputs are placed into input buffers.
|
|
// The functions corresponding to input buffer positions have metadata
|
|
// recording their streams from forward, and during backward this
|
|
// data is used to sync the producer's stream with the consumer's.
|
|
//
|
|
// When a CUDA function is run either all its inputs were accumulated on the
|
|
// stream used to run the function OR the inputs are on different devices
|
|
// and the function is responsible for properly acquiring them.
|
|
//
|
|
// User-facing stream semantics of a backward() (or torch.autograd.grad())
|
|
// call with respect to surrounding ops are the same as for any other call.
|
|
// See "Stream semantics of backward passes" on
|
|
// https://pytorch.org/docs/stable/notes/cuda.html
|
|
//
|
|
// Internally, backward() runs ops (including leaf nodes) on side threads.
|
|
// And streams are thread local. So GraphTask achieves the above semantics by
|
|
// 1. remembering the current streams on all active CUDA devices
|
|
// in the user-facing thread (aka, the thread that called execute() to
|
|
// launch the GraphTask)
|
|
// 2. remembering the "leaf streams" (streams each backward leaf node ran on)
|
|
// 3. during exec_post_processing, for each leaf stream, sync the remembered
|
|
// current streams (on the leaf stream's device) with that
|
|
// leaf stream.
|
|
|
|
int NodeTask::getReentrantDepth() const {
|
|
std::shared_ptr<GraphTask> graph_task = base_.lock();
|
|
if (graph_task) {
|
|
return graph_task->reentrant_depth_;
|
|
} else {
|
|
// The graph task is no longer valid indicating an error. As a result, we
|
|
// try to move this to the front of the queue to ensure the autograd
|
|
// engine threads pick up this error soon.
|
|
return std::numeric_limits<int>::max();
|
|
}
|
|
}
|
|
|
|
CheckpointValidGuard::CheckpointValidGuard(
|
|
const std::shared_ptr<const GraphTask>& graph_task) {
|
|
prev_checkpoint_valid_state = checkpoint_valid;
|
|
checkpoint_valid =
|
|
graph_task->can_checkpoint() && prev_checkpoint_valid_state;
|
|
}
|
|
|
|
CheckpointValidGuard::~CheckpointValidGuard() {
|
|
checkpoint_valid = prev_checkpoint_valid_state;
|
|
}
|
|
|
|
auto ReadyQueue::push(NodeTask item, bool incrementOutstandingTasks) -> void {
|
|
{
|
|
// Lock mutex for writing to heap_
|
|
std::lock_guard<std::mutex> lock(mutex_);
|
|
if (incrementOutstandingTasks) {
|
|
std::shared_ptr<GraphTask> graph_task = item.base_.lock();
|
|
TORCH_INTERNAL_ASSERT(graph_task, "GraphTask is no longer valid!");
|
|
++graph_task->outstanding_tasks_;
|
|
}
|
|
heap_.push(std::move(item));
|
|
}
|
|
not_empty_.notify_one();
|
|
}
|
|
|
|
auto ReadyQueue::pushShutdownTask() -> void {
|
|
{
|
|
std::lock_guard<std::mutex> lock(mutex_);
|
|
heap_.push(NodeTask({}, nullptr, InputBuffer(0), true));
|
|
}
|
|
not_empty_.notify_one();
|
|
}
|
|
|
|
size_t ReadyQueue::size() const {
|
|
// Lock mutex for accesses to heap_
|
|
std::unique_lock<std::mutex> lock(mutex_);
|
|
return heap_.size();
|
|
}
|
|
|
|
auto ReadyQueue::pop() -> NodeTask {
|
|
// Lock mutex for accesses to heap_
|
|
std::unique_lock<std::mutex> lock(mutex_);
|
|
not_empty_.wait(lock, [this] { return !heap_.empty(); });
|
|
// NOLINTNEXTLINE(cppcoreguidelines-pro-type-const-cast)
|
|
auto task = std::move(const_cast<NodeTask&>(heap_.top()));
|
|
heap_.pop();
|
|
return task;
|
|
}
|
|
|
|
bool ReadyQueue::empty() const {
|
|
// Lock mutex for accesses to heap_
|
|
std::unique_lock<std::mutex> lock(mutex_);
|
|
return heap_.empty();
|
|
}
|
|
|
|
Engine::Engine()
|
|
: max_recursion_depth_(MAX_DEPTH), non_reentrant_device_thread_count_(0) {}
|
|
|
|
Engine::~Engine() {
|
|
stop();
|
|
}
|
|
|
|
// Send shutdown tasks to all device_ready_queues_ if no backward tasks are
|
|
// running Even though readyQueue should be empty, shutdown tasks have the
|
|
// highest priority
|
|
void Engine::stop() {
|
|
if (stopped_) {
|
|
return;
|
|
}
|
|
stopped_ = true;
|
|
// Under some conditions, autograd threads can hang on shutdown
|
|
// Do not wait for them to shutdown indefinitely but rely on timeout
|
|
auto wait_duration_str = getenv("TORCH_AUTOGRAD_SHUTDOWN_WAIT_LIMIT");
|
|
if (!wait_duration_str) {
|
|
wait_duration_str = "10.0";
|
|
}
|
|
auto wait_duration = std::atof(wait_duration_str);
|
|
bool noBackward = true;
|
|
for (auto& queue : device_ready_queues_) {
|
|
noBackward = noBackward && queue->empty();
|
|
}
|
|
if (noBackward && wait_duration > 0.0f) {
|
|
for (auto& queue : device_ready_queues_) {
|
|
queue->pushShutdownTask();
|
|
}
|
|
// Do not wait for termination of global threads on Windows
|
|
// Because CRT terminates DLL threads before calling
|
|
// global object destructors
|
|
#if !defined(_WIN32) || defined(C10_USE_MSVC_STATIC_RUNTIME)
|
|
|
|
using namespace std::chrono_literals;
|
|
// Set a deadline for how long it is OK to wait device threads to shutdown
|
|
auto wait_deadline =
|
|
std::chrono::steady_clock::now() + wait_duration * 1.0s;
|
|
std::unique_lock<std::mutex> lk(non_reentrant_device_thread_mutex_);
|
|
while (non_reentrant_device_thread_count_.load() != 0) {
|
|
if (non_reentrant_device_thread_condvar_.wait_until(lk, wait_deadline) ==
|
|
std::cv_status::timeout) {
|
|
break;
|
|
}
|
|
}
|
|
#endif
|
|
}
|
|
// Otherwise threads are leaked
|
|
}
|
|
|
|
void Engine::release_workers() {
|
|
std::unique_lock<std::mutex> lk(non_reentrant_device_thread_mutex_);
|
|
non_reentrant_device_thread_count_.store(0);
|
|
non_reentrant_device_thread_condvar_.notify_one();
|
|
}
|
|
|
|
void Engine::increment_non_reentrant_thread_count() {
|
|
std::unique_lock<std::mutex> lk(non_reentrant_device_thread_mutex_);
|
|
non_reentrant_device_thread_count_.fetch_add(1);
|
|
non_reentrant_device_thread_condvar_.notify_one();
|
|
}
|
|
|
|
void Engine::decrement_non_reentrant_thread_count() {
|
|
std::unique_lock<std::mutex> lk(non_reentrant_device_thread_mutex_);
|
|
non_reentrant_device_thread_count_.fetch_sub(1);
|
|
non_reentrant_device_thread_condvar_.notify_one();
|
|
}
|
|
|
|
void Engine::thread_init(
|
|
int device,
|
|
const std::shared_ptr<ReadyQueue>& ready_queue,
|
|
bool should_increment) {
|
|
if (should_increment) {
|
|
increment_non_reentrant_thread_count();
|
|
}
|
|
|
|
at::init_num_threads();
|
|
|
|
// Note [Allocating GPUs to autograd threads]
|
|
// ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
|
|
// What's our strategy here? Originally, the autograd engine was written
|
|
// with only CUDA in mind. We allocate one thread to handle all CPU
|
|
// operations, and a thread per CUDA device.
|
|
//
|
|
// But what if we have OTHER devices? There are two plausible
|
|
// strategies:
|
|
//
|
|
// - We can allocate threads equal to max(num_cuda_devices, num_xla_devices,
|
|
// ...) and colocate cuda device 0 with xla device 0
|
|
// - We can allocate threads equal to sum(num_cuda_devices, num_xla_devices,
|
|
// ...) keeping everyone separate.
|
|
//
|
|
// We don't have any good reason to prefer one or the other, so we've
|
|
// arbitrarily picked to colocate devices. Maybe the other approach is
|
|
// better.
|
|
set_device(device);
|
|
|
|
// initialize each device thread's thread local ready queue with the ready
|
|
// queue that is created before the thread initialization
|
|
init_local_ready_queue(ready_queue);
|
|
|
|
std::shared_ptr<GraphTask> graph_task = nullptr;
|
|
thread_main(graph_task);
|
|
if (should_increment) {
|
|
// Decrement the count during shutdown if we incremented earlier.
|
|
decrement_non_reentrant_thread_count();
|
|
}
|
|
}
|
|
|
|
GraphTaskGuard::GraphTaskGuard(std::shared_ptr<GraphTask> graph_task) {
|
|
last_graph_task_ = std::move(current_graph_task);
|
|
current_graph_task = std::move(graph_task);
|
|
}
|
|
GraphTaskGuard::~GraphTaskGuard() {
|
|
restore_current_graph_task();
|
|
}
|
|
|
|
void GraphTaskGuard::restore_current_graph_task() {
|
|
current_graph_task = std::move(last_graph_task_);
|
|
}
|
|
|
|
// The current graph task's exec_info is being used to trim unnecessary edegs
|
|
// during node evaluation, see `Node.task_should_compute_output()` function.
|
|
const std::unordered_map<Node*, GraphTask::ExecInfo>*
|
|
get_current_graph_task_exec_info() {
|
|
return current_graph_task ? ¤t_graph_task->exec_info_ : nullptr;
|
|
}
|
|
|
|
void add_node_to_current_graph_task_exec_info(Node* fn) {
|
|
current_graph_task->exec_info_[fn].needed_ = true;
|
|
}
|
|
|
|
// NOTE: graph_tasks do not necessarily form a stack. Imagine this
|
|
// case:
|
|
//
|
|
// +----> Eval1
|
|
// Root
|
|
// +----> Eval2
|
|
//
|
|
// Once Root is executed, both Eval1 and Eval2 are added to the ready queue.
|
|
// Next, Eval1 is run and this causes the worker to enter thread_main again.
|
|
// Then, it pops the next task from the queue, but at this point it is Eval2.
|
|
// It enters thread_main once again, but now with graph_task of Eval2, which is
|
|
// completely unrelated to that of Eval1 (it's not a recursive call).
|
|
// It's all ok and is handled right now, but it should be accounted for
|
|
// in case this code is to be changed.
|
|
//
|
|
// thread_main is used by:
|
|
// 1). autograd threads for devices (i.e. CUDA, XLA)
|
|
// 2). the caller/owning thread of the backward call on CPU (sync mode)
|
|
// 3). Renetrant backward that invoked by either 1) or 2)
|
|
// The exit conditions are different for the above three cases.
|
|
// For 1), we are spinning on running the thread_main on device autograd
|
|
// threads throughout the Engine lifetime, thread_main will get
|
|
// terminated during Engine destruction by pushing shutdown tasks
|
|
// For 2), the owning thread of the backward call drives the thread_main
|
|
// synchronously until the graph_task of that owning thread is
|
|
// completed and exit the thread_main to continue executing the
|
|
// result of caller's code.
|
|
// For 3), the reentrant backward that invokes
|
|
// thread_main, either from 1) or 2), will not spin and will exit as
|
|
// long as graph_task is completed and notify the owning thread as
|
|
// needed.
|
|
auto Engine::thread_main(const std::shared_ptr<GraphTask>& graph_task) -> void {
|
|
// When graph_task is nullptr, this is a long running thread that processes
|
|
// tasks (ex: device threads). When graph_task is non-null (ex: reentrant
|
|
// backwards, user thread), this function is expected to exit once that
|
|
// graph_task complete.
|
|
|
|
// local_ready_queue should already been initialized when we get into
|
|
// thread_main
|
|
TORCH_INTERNAL_ASSERT(local_ready_queue != nullptr);
|
|
while (graph_task == nullptr || !graph_task->future_result_->completed()) {
|
|
// local_graph_task represents the graph_task we retrieve from the queue.
|
|
// The outer graph_task represents the overall graph_task we need to execute
|
|
// for reentrant execution.
|
|
std::shared_ptr<GraphTask> local_graph_task;
|
|
{
|
|
// Scope this block of execution since NodeTask is not needed after this
|
|
// block and can be deallocated (release any references to grad tensors
|
|
// as part of inputs_).
|
|
NodeTask task = local_ready_queue->pop();
|
|
// This will only work if the worker is running a non backward task
|
|
// TODO Needs to be fixed this to work in all cases
|
|
if (task.isShutdownTask_) {
|
|
C10_LOG_API_USAGE_ONCE("torch.autograd.thread_shutdown");
|
|
break;
|
|
}
|
|
|
|
if (!(local_graph_task = task.base_.lock())) {
|
|
// GraphTask for function is no longer valid, skipping further
|
|
// execution.
|
|
continue;
|
|
}
|
|
|
|
if (task.fn_ && !local_graph_task->has_error_.load()) {
|
|
// Set the ThreadLocalState before calling the function.
|
|
// NB: The ThreadLocalStateGuard doesn't set the grad_mode because
|
|
// GraphTask always saves ThreadLocalState without grad_mode.
|
|
at::ThreadLocalStateGuard tls_guard(local_graph_task->thread_locals_);
|
|
c10::Warning::WarningHandlerGuard warnings_guard(
|
|
&local_graph_task->warning_handler_);
|
|
|
|
try {
|
|
// The guard sets the thread_local current_graph_task on construction
|
|
// and restores it on exit. The current_graph_task variable helps
|
|
// queue_callback() to find the target GraphTask to append final
|
|
// callbacks.
|
|
GraphTaskGuard guard(local_graph_task);
|
|
NodeGuard ndguard(task.fn_);
|
|
{
|
|
RECORD_FUNCTION(
|
|
c10::str(
|
|
"autograd::engine::evaluate_function: ",
|
|
task.fn_.get()->name()),
|
|
c10::ArrayRef<const c10::IValue>());
|
|
evaluate_function(
|
|
local_graph_task,
|
|
task.fn_.get(),
|
|
task.inputs_,
|
|
local_graph_task->cpu_ready_queue_);
|
|
}
|
|
} catch (std::exception& e) {
|
|
thread_on_exception(local_graph_task, task.fn_, e);
|
|
}
|
|
}
|
|
}
|
|
|
|
// Decrement the outstanding tasks.
|
|
--local_graph_task->outstanding_tasks_;
|
|
|
|
// Check if we've completed execution.
|
|
if (local_graph_task->completed()) {
|
|
local_graph_task->mark_as_completed_and_run_post_processing();
|
|
|
|
auto base_owner = local_graph_task->owner_;
|
|
// The current worker thread finish the graph_task, but the owning thread
|
|
// of the graph_task might be sleeping on pop() if it does not have work.
|
|
// So we need to send a dummy function task to the owning thread just to
|
|
// ensure that it's not sleeping, so that we can exit the thread_main.
|
|
// If it has work, it might see that graph_task->outstanding_tasks_ == 0
|
|
// before it gets to the task, but it's a no-op anyway.
|
|
//
|
|
// NB: This is not necessary if the current thread is the owning thread.
|
|
if (worker_device != base_owner) {
|
|
// Synchronize outstanding_tasks_ with queue mutex
|
|
std::atomic_thread_fence(std::memory_order_release);
|
|
ready_queue_by_index(local_graph_task->cpu_ready_queue_, base_owner)
|
|
->push(NodeTask(local_graph_task, nullptr, InputBuffer(0)));
|
|
}
|
|
}
|
|
}
|
|
}
|
|
|
|
// Reentrant call will re-use the graph_task's owner thread ready_queue for
|
|
// queueing tasks (NOTE: this is not true in the async_mode of the engine).
|
|
// While we can create separate ready queue for each new reentrant
|
|
// thread, but sharing the same cpu_ready_queue with parent thread is a
|
|
// performance improvement and cuda thread still have to do the same thing.
|
|
void Engine::reentrant_thread_init() {
|
|
at::init_num_threads();
|
|
auto tp_shared = thread_pool_shared_;
|
|
while (true) {
|
|
std::unique_lock<std::mutex> lk(tp_shared->mutex_);
|
|
++thread_pool_shared_->num_workers_;
|
|
tp_shared->work_.wait(
|
|
lk, [&tp_shared] { return !tp_shared->graphtasks_queue_.empty(); });
|
|
--thread_pool_shared_->num_workers_;
|
|
auto task = tp_shared->graphtasks_queue_.front();
|
|
tp_shared->graphtasks_queue_.pop();
|
|
lk.unlock();
|
|
std::shared_ptr<GraphTask> graph_task;
|
|
if (!(graph_task = task.lock())) {
|
|
LOG(INFO) << "GraphTask has expired, skipping reentrant execution";
|
|
continue;
|
|
}
|
|
set_device(graph_task->owner_);
|
|
// set the local_ready_queue to the ready queue on the graph_task->owner_
|
|
// device
|
|
local_ready_queue =
|
|
ready_queue_by_index(graph_task->cpu_ready_queue_, graph_task->owner_);
|
|
total_depth = graph_task->reentrant_depth_;
|
|
thread_main(graph_task);
|
|
}
|
|
}
|
|
|
|
void Engine::thread_on_exception(
|
|
std::shared_ptr<GraphTask> graph_task,
|
|
const std::shared_ptr<Node>& fn,
|
|
std::exception& e) {
|
|
graph_task->set_exception(std::current_exception(), fn);
|
|
}
|
|
|
|
bool GraphTask::completed() {
|
|
return outstanding_tasks_.load() == 0 ||
|
|
(exit_on_error_ && has_error_.load());
|
|
}
|
|
|
|
void GraphTask::mark_as_completed_and_run_post_processing() {
|
|
// Allow only one thread one attempt to process this logic.
|
|
if (future_completed_.exchange(true)) {
|
|
// Future is already marked complete, or being marked as such.
|
|
// In case the marking complete is only in progress, we add a
|
|
// wait() to guarantee the future is marked complete on exit.
|
|
future_result_->wait();
|
|
return;
|
|
}
|
|
|
|
try {
|
|
// Run post processing, before marking the future as complete.
|
|
// Drop lock prior to completing, to avoid holding across callbacks.
|
|
std::unique_lock<std::mutex> lock(mutex_);
|
|
|
|
exec_post_processing();
|
|
std::vector<Variable> vars = std::move(captured_vars_);
|
|
|
|
// Need to unlock before we call markCompleted to avoid holding locks
|
|
// when the callbacks are called.
|
|
lock.unlock();
|
|
// NOLINTNEXTLINE(performance-move-const-arg)
|
|
future_result_->markCompleted(std::move(vars));
|
|
} catch (std::exception& e) {
|
|
future_result_->setErrorIfNeeded(std::current_exception());
|
|
}
|
|
}
|
|
|
|
void GraphTask::exec_post_processing() {
|
|
if (!not_ready_.empty()) {
|
|
throw std::runtime_error("could not compute gradients for some functions");
|
|
}
|
|
|
|
// set the thread_local current_graph_task_ as more callbacks can be installed
|
|
// by existing final callbacks.
|
|
GraphTaskGuard guard(shared_from_this());
|
|
// Lock mutex during each iteration for accessing final_callbacks.size()
|
|
// Unlocking is necessary, because the callback can register
|
|
// more callbacks (or they can be registered from other threads
|
|
// while it's waiting.
|
|
std::unique_lock<std::mutex> cb_lock(final_callbacks_lock_);
|
|
|
|
// caller_current_streams_ with nullopt entries removed
|
|
std::vector<c10::Stream> caller_current_streams_filtered;
|
|
|
|
// See Note [Streaming backwards].
|
|
// Syncs caller_current_stream with leaf streams, so final_callbacks may use
|
|
// any grad on its device's current stream.
|
|
if (leaf_streams.size() > 0) {
|
|
for (const auto& leaf_stream : leaf_streams) {
|
|
// stash_current_streams() stashed streams for all device IDs that already
|
|
// had a CUDA context before the GraphTask executed. For inactive devices,
|
|
// it stashed a c10::nullopt. I don't expect GraphTask's backward pass ran
|
|
// leaf nodes on any new devices, so the stashed streams should be enough.
|
|
// If leaf_stream.device_index() happens to be for a new device,
|
|
// operator* on the c10::nullopt should throw an error.
|
|
const auto caller_current_stream =
|
|
*caller_current_streams_[leaf_stream.device_index()];
|
|
|
|
if (caller_current_stream != leaf_stream) {
|
|
auto event = c10::Event{c10::DeviceType::CUDA};
|
|
event.record(leaf_stream);
|
|
caller_current_stream.wait(event);
|
|
}
|
|
}
|
|
|
|
caller_current_streams_filtered.reserve(caller_current_streams_.size());
|
|
for (const auto& opt_stream : caller_current_streams_) {
|
|
if (opt_stream.has_value()) {
|
|
caller_current_streams_filtered.push_back(*opt_stream);
|
|
}
|
|
}
|
|
}
|
|
|
|
{
|
|
// final_callbacks run on the per-device caller_current_streams (the ambient
|
|
// streams surrounding the user's call to backward()). This has two
|
|
// benefits:
|
|
// 1. caller_current_streams have been synced with leaf_streams, so
|
|
// callbacks may
|
|
// safely access any grad.
|
|
// 2. The callback's results can safely be used on (user-facing)
|
|
// caller_current_streams
|
|
// after backward().
|
|
c10::MultiStreamGuard g(caller_current_streams_filtered);
|
|
|
|
// Set the ThreadLocalState before calling the function.
|
|
// NB: The ThreadLocalStateGuard doesn't set the grad_mode because GraphTask
|
|
// always saves ThreadLocalState without grad_mode.
|
|
at::ThreadLocalStateGuard tls_guard(this->thread_locals_);
|
|
|
|
// WARNING: Don't use a range-for loop here because more callbacks may be
|
|
// added in between callback calls, so iterators may become invalidated.
|
|
// NOLINTNEXTLINE(modernize-loop-convert)
|
|
for (size_t i = 0; i < final_callbacks_.size(); ++i) {
|
|
cb_lock.unlock();
|
|
final_callbacks_[i]();
|
|
cb_lock.lock();
|
|
}
|
|
}
|
|
}
|
|
|
|
void GraphTask::set_exception_without_signal(const std::shared_ptr<Node>& fn) {
|
|
if (!has_error_.exchange(true)) {
|
|
if (AnomalyMode::is_enabled() && fn) {
|
|
fn->metadata()->print_stack(fn->name());
|
|
}
|
|
}
|
|
}
|
|
|
|
void GraphTask::set_exception(
|
|
std::exception_ptr eptr,
|
|
const std::shared_ptr<Node>& fn) {
|
|
set_exception_without_signal(fn);
|
|
if (!future_completed_.exchange(true)) {
|
|
// NOLINTNEXTLINE(performance-move-const-arg)
|
|
future_result_->setError(std::move(eptr));
|
|
}
|
|
}
|
|
|
|
static variable_list call_pre_hooks(Node& fn, variable_list inputs) {
|
|
for (const auto& hook : fn.pre_hooks()) {
|
|
inputs = (*hook)(inputs);
|
|
}
|
|
return inputs;
|
|
}
|
|
|
|
static variable_list call_post_hooks(
|
|
Node& fn,
|
|
variable_list outputs,
|
|
const variable_list& inputs) {
|
|
for (const auto& hook : fn.post_hooks()) {
|
|
outputs = (*hook)(outputs, inputs);
|
|
}
|
|
return outputs;
|
|
}
|
|
|
|
void set_device(int device) {
|
|
// NB: We MUST NOT construct the guard for device CPU,
|
|
// as in some settings we compile with cuda, but
|
|
// have lazy stubs for CUDA functionality (so actually
|
|
// attempting to setup a guard(CPU_DEVICE) will cause an
|
|
// error, because it will still query cudaGetDevice).
|
|
//
|
|
// Don't use DeviceGuard here because its destructor may be called before the
|
|
// device is reset. This is fine because the device is thread local.
|
|
if (device != CPU_DEVICE) {
|
|
for (const auto i : c10::irange(static_cast<size_t>(
|
|
c10::DeviceType::COMPILE_TIME_MAX_DEVICE_TYPES))) {
|
|
auto* impl = c10::impl::device_guard_impl_registry[i].load();
|
|
if (impl && device < impl->deviceCount()) {
|
|
impl->setDevice(at::Device(static_cast<c10::DeviceType>(i), device));
|
|
}
|
|
}
|
|
}
|
|
worker_device = device;
|
|
}
|
|
|
|
void validate_outputs(
|
|
const edge_list& edges,
|
|
variable_list& grads,
|
|
const std::function<std::string(const std::string&)>& format_error) {
|
|
if (grads.size() != edges.size()) {
|
|
std::stringstream ss;
|
|
ss << "invalid number of gradients - expected ";
|
|
ss << edges.size() << ", but got " << grads.size();
|
|
AT_ERROR(format_error(ss.str()));
|
|
}
|
|
for (const auto i : c10::irange(grads.size())) {
|
|
const auto& edge = edges[i];
|
|
if (!edge.is_valid())
|
|
continue;
|
|
|
|
const auto& metadata = edge.function->input_metadata(edge.input_nr);
|
|
auto& grad = grads[i];
|
|
if (!grad.defined()) {
|
|
// FIXME: TestJit.test_ge_optimized fails this assertion.
|
|
// std::stringstream ss;
|
|
// ss << "undefined gradient at index " << i;
|
|
// AT_ERROR(format_error(ss.str()));
|
|
continue;
|
|
}
|
|
|
|
if (!metadata.is_same_shape(grad)) {
|
|
if (metadata.is_expandable_to_shape(grad)) {
|
|
grad = metadata.reduce_grad(grad);
|
|
} else {
|
|
const auto message = metadata.incompatible_shape_error_message(i, grad);
|
|
AT_ERROR(format_error(message.str()));
|
|
}
|
|
}
|
|
|
|
bool input_is_complex =
|
|
isComplexType(c10::typeMetaToScalarType(metadata.options().dtype()));
|
|
bool grad_is_complex = isComplexType(grad.scalar_type());
|
|
|
|
TORCH_CHECK(
|
|
isFloatingType(grad.scalar_type()) ||
|
|
(input_is_complex == grad_is_complex));
|
|
if (c10::typeMetaToScalarType(metadata.options().dtype()) !=
|
|
grad.scalar_type()) {
|
|
grad = grad.to(c10::typeMetaToScalarType(metadata.options().dtype()));
|
|
}
|
|
if (grad.dtype() != metadata.dtype()) {
|
|
std::stringstream ss;
|
|
ss << "invalid gradient at index " << i << " - expected dtype ";
|
|
ss << metadata.dtype() << " but got " << grad.dtype();
|
|
AT_ERROR(format_error(ss.str()));
|
|
}
|
|
if (grad.layout() != metadata.layout()) {
|
|
// TODO: Currently we only support (*, Sparse) combination for
|
|
// (tensor.layout(), tensor.grad.layout()) In future, there will be an
|
|
// oppportunity to support more combinations of layouts if they are
|
|
// composable (example., operations like addition etc., are well defined
|
|
// between tensors of different layouts.), as well as all parts of
|
|
// autograd like AccumulateGrad correctly handle this. We allow grad to be
|
|
// Strided when metadata is SparseCsr
|
|
if (!grad.is_sparse() &&
|
|
!(grad.layout() == at::kStrided &&
|
|
metadata.layout() == at::kSparseCsr)) {
|
|
std::stringstream ss;
|
|
ss << "invalid gradient at index " << i << " - expected layout ";
|
|
ss << metadata.layout() << " but got " << grad.layout();
|
|
AT_ERROR(format_error(ss.str()));
|
|
}
|
|
}
|
|
|
|
if (grad.device() != metadata.device()) {
|
|
// quick hack for: https://github.com/pytorch/pytorch/issues/65016 but
|
|
// should be eventually removed
|
|
if (!(metadata.is_tensor_subclass() ||
|
|
grad.unsafeGetTensorImpl()->is_python_dispatch())) {
|
|
if (grad.dim() == 0) {
|
|
grad = grad.to(metadata.device());
|
|
} else {
|
|
std::stringstream ss;
|
|
ss << "invalid gradient at index " << i << " - expected device ";
|
|
ss << metadata.device() << " but got " << grad.device();
|
|
AT_ERROR(format_error(ss.str()));
|
|
}
|
|
}
|
|
}
|
|
// We should not build graph for Tensors that are not differentiable
|
|
TORCH_INTERNAL_ASSERT(isDifferentiableType(grad.scalar_type()));
|
|
}
|
|
}
|
|
|
|
static variable_list call_function(
|
|
std::shared_ptr<GraphTask>& graph_task,
|
|
Node* func,
|
|
InputBuffer& inputBuffer) {
|
|
CheckpointValidGuard cpvguard(graph_task);
|
|
auto& fn = *func;
|
|
auto inputs =
|
|
call_pre_hooks(fn, InputBuffer::variables(std::move(inputBuffer)));
|
|
|
|
if (!graph_task->keep_graph_) {
|
|
fn.will_release_variables();
|
|
}
|
|
|
|
const auto has_post_hooks = !fn.post_hooks().empty();
|
|
variable_list outputs;
|
|
|
|
if (has_post_hooks) {
|
|
// In functions/accumulate_grad.cpp, there is some logic to check the
|
|
// conditions under which the incoming gradient can be stolen directly
|
|
// (which elides a deep copy) instead of cloned. One of these conditions
|
|
// is that the incoming gradient's refcount must be 1 (nothing else is
|
|
// referencing the same data). Stashing inputs_copy here bumps the
|
|
// refcount, so if post hooks are employed, it's actually still ok for
|
|
// accumulate_grad.cpp to steal the gradient if the refcount is 2.
|
|
//
|
|
// "new_grad.use_count() <= 1 + !post_hooks().empty()" in
|
|
// accumulate_grad.cpp accounts for this, but also creates a silent
|
|
// dependency between engine.cpp (ie, this particular engine
|
|
// implementation) and accumulate_grad.cpp.
|
|
//
|
|
// If you change the logic here, make sure it's compatible with
|
|
// accumulate_grad.cpp.
|
|
auto inputs_copy = inputs;
|
|
outputs = fn(std::move(inputs_copy));
|
|
} else {
|
|
outputs = fn(std::move(inputs));
|
|
}
|
|
|
|
validate_outputs(fn.next_edges(), outputs, [&](const std::string& msg) {
|
|
std::ostringstream ss;
|
|
ss << "Function " << fn.name() << " returned an " << msg;
|
|
return ss.str();
|
|
});
|
|
|
|
if (has_post_hooks) {
|
|
// NOLINTNEXTLINE(bugprone-use-after-move)
|
|
return call_post_hooks(fn, std::move(outputs), inputs);
|
|
}
|
|
return outputs;
|
|
}
|
|
|
|
void Engine::evaluate_function(
|
|
std::shared_ptr<GraphTask>& graph_task,
|
|
Node* func,
|
|
InputBuffer& inputs,
|
|
const std::shared_ptr<ReadyQueue>& cpu_ready_queue) {
|
|
// The InputBuffer::adds that supplied incoming grads took pains to
|
|
// ensure they're safe to consume in the context of the present
|
|
// func's stream (if applicable). So we guard onto that stream
|
|
// before working with the grads in any capacity.
|
|
const auto opt_parent_stream = (*func).stream(c10::DeviceType::CUDA);
|
|
c10::OptionalStreamGuard parent_stream_guard{opt_parent_stream};
|
|
|
|
// If exec_info_ is not empty, we have to instrument the execution
|
|
auto& exec_info_ = graph_task->exec_info_;
|
|
if (!exec_info_.empty()) {
|
|
auto& fn_info = exec_info_.at(func);
|
|
if (auto* capture_vec = fn_info.captures_.get()) {
|
|
// Lock mutex for writing to graph_task->captured_vars_.
|
|
std::lock_guard<std::mutex> lock(graph_task->mutex_);
|
|
for (const auto& capture : *capture_vec) {
|
|
auto& captured_grad = graph_task->captured_vars_[capture.output_idx_];
|
|
captured_grad = inputs[capture.input_idx_];
|
|
for (auto& hook : capture.hooks_) {
|
|
captured_grad = (*hook)(captured_grad);
|
|
}
|
|
if (opt_parent_stream) {
|
|
// No need to take graph_task->mutex_ here, we already hold it
|
|
graph_task->leaf_streams.emplace(*opt_parent_stream);
|
|
}
|
|
}
|
|
}
|
|
if (!fn_info.needed_) {
|
|
// Skip execution if we don't need to execute the function.
|
|
return;
|
|
}
|
|
}
|
|
|
|
auto outputs = call_function(graph_task, func, inputs);
|
|
|
|
auto& fn = *func;
|
|
if (!graph_task->keep_graph_) {
|
|
fn.release_variables();
|
|
}
|
|
|
|
int num_outputs = outputs.size();
|
|
if (num_outputs == 0) { // Note: doesn't acquire the mutex
|
|
// Records leaf stream (if applicable)
|
|
// See Note [Streaming backwards]
|
|
if (opt_parent_stream) {
|
|
std::lock_guard<std::mutex> lock(graph_task->mutex_);
|
|
graph_task->leaf_streams.emplace(*opt_parent_stream);
|
|
}
|
|
return;
|
|
}
|
|
|
|
if (AnomalyMode::is_enabled()) {
|
|
AutoGradMode grad_mode(false);
|
|
for (const auto i : c10::irange(num_outputs)) {
|
|
auto& output = outputs[i];
|
|
at::OptionalDeviceGuard guard(device_of(output));
|
|
if (output.defined() && isnan(output).any().item<uint8_t>()) {
|
|
std::stringstream ss;
|
|
ss << "Function '" << fn.name() << "' returned nan values in its " << i
|
|
<< "th output.";
|
|
throw std::runtime_error(ss.str());
|
|
}
|
|
}
|
|
}
|
|
|
|
// Lock mutex for the accesses to GraphTask dependencies_, not_ready_ and
|
|
// cpu_ready_queue_ below
|
|
std::lock_guard<std::mutex> lock(graph_task->mutex_);
|
|
for (const auto i : c10::irange(num_outputs)) {
|
|
auto& output = outputs[i];
|
|
const auto& next = fn.next_edge(i);
|
|
|
|
if (!next.is_valid())
|
|
continue;
|
|
|
|
// Check if the next function is ready to be computed
|
|
bool is_ready = false;
|
|
auto& dependencies = graph_task->dependencies_;
|
|
auto it = dependencies.find(next.function.get());
|
|
|
|
if (it == dependencies.end()) {
|
|
auto name = next.function->name();
|
|
throw std::runtime_error(std::string("dependency not found for ") + name);
|
|
} else if (--it->second == 0) {
|
|
dependencies.erase(it);
|
|
is_ready = true;
|
|
}
|
|
|
|
auto& not_ready = graph_task->not_ready_;
|
|
auto not_ready_it = not_ready.find(next.function.get());
|
|
if (not_ready_it == not_ready.end()) {
|
|
// Skip functions that aren't supposed to be executed
|
|
if (!exec_info_.empty()) {
|
|
auto it = exec_info_.find(next.function.get());
|
|
if (it == exec_info_.end() || !it->second.should_execute()) {
|
|
continue;
|
|
}
|
|
}
|
|
// No buffers have been allocated for the function
|
|
InputBuffer input_buffer(next.function->num_inputs());
|
|
|
|
// Accumulates into buffer
|
|
const auto opt_next_stream = next.function->stream(c10::DeviceType::CUDA);
|
|
input_buffer.add(
|
|
next.input_nr, std::move(output), opt_parent_stream, opt_next_stream);
|
|
|
|
if (is_ready) {
|
|
auto queue = ready_queue(cpu_ready_queue, input_buffer.device());
|
|
queue->push(
|
|
NodeTask(graph_task, next.function, std::move(input_buffer)));
|
|
} else {
|
|
not_ready.emplace(next.function.get(), std::move(input_buffer));
|
|
}
|
|
} else {
|
|
// The function already has a buffer
|
|
auto& input_buffer = not_ready_it->second;
|
|
|
|
// Accumulates into buffer
|
|
const auto opt_next_stream = next.function->stream(c10::DeviceType::CUDA);
|
|
input_buffer.add(
|
|
next.input_nr, std::move(output), opt_parent_stream, opt_next_stream);
|
|
if (is_ready) {
|
|
auto queue = ready_queue(cpu_ready_queue, input_buffer.device());
|
|
queue->push(
|
|
NodeTask(graph_task, next.function, std::move(input_buffer)));
|
|
not_ready.erase(not_ready_it);
|
|
}
|
|
}
|
|
}
|
|
}
|
|
|
|
inline static uint64_t compute_min_topological_nr(const edge_list& outputs) {
|
|
// Computes the mininum topological number among all the outputs
|
|
if (outputs.empty()) {
|
|
return 0;
|
|
}
|
|
auto min_topo_nr = std::numeric_limits<uint64_t>::max();
|
|
for (auto& output_edge : outputs) {
|
|
auto topo_nr = output_edge.function.get()->topological_nr();
|
|
min_topo_nr = (min_topo_nr < topo_nr) ? min_topo_nr : topo_nr;
|
|
}
|
|
return min_topo_nr;
|
|
}
|
|
|
|
auto Engine::compute_dependencies(
|
|
Node* root,
|
|
GraphTask& task,
|
|
uint64_t min_topo_nr) -> void {
|
|
// Computes the number of dependencies for each function which requires grad
|
|
std::unordered_set<Node*> seen;
|
|
std::vector<Node*> queue{root};
|
|
bool might_use_cuda = at::globalContext().hasCUDA();
|
|
bool will_use_cuda = false;
|
|
|
|
// Queue contains all nodes that will start propagating gradients.
|
|
// We no longer have to expand functions that don't require grad.
|
|
auto& dependencies = task.dependencies_;
|
|
while (!queue.empty()) {
|
|
auto fn = queue.back();
|
|
queue.pop_back();
|
|
if (fn->topological_nr() < min_topo_nr) {
|
|
continue;
|
|
}
|
|
if (might_use_cuda && !will_use_cuda) {
|
|
will_use_cuda = fn->stream(c10::DeviceType::CUDA).has_value();
|
|
}
|
|
for (const auto& edge : fn->next_edges()) {
|
|
if (auto next_ptr = edge.function.get()) {
|
|
dependencies[next_ptr] += 1;
|
|
const bool was_inserted = seen.insert(next_ptr).second;
|
|
if (was_inserted)
|
|
queue.push_back(next_ptr);
|
|
}
|
|
}
|
|
}
|
|
|
|
if (will_use_cuda) {
|
|
// Collects current streams for devices where this process has a context,
|
|
// so GraphTask::exec_post_processing can sync them with leaf_streams.
|
|
task.stash_current_streams();
|
|
}
|
|
}
|
|
|
|
auto Engine::execute(
|
|
const edge_list& roots,
|
|
const variable_list& inputs,
|
|
bool keep_graph,
|
|
bool create_graph,
|
|
bool accumulate_grad,
|
|
const edge_list& outputs) -> variable_list {
|
|
// NOLINTNEXTLINE(cppcoreguidelines-pro-type-const-cast)
|
|
validate_outputs(
|
|
roots, const_cast<variable_list&>(inputs), [](const std::string& msg) {
|
|
return msg;
|
|
});
|
|
if (accumulate_grad && create_graph) {
|
|
TORCH_WARN_ONCE(
|
|
"Using backward() with create_graph=True will create a reference cycle "
|
|
"between the parameter and its gradient which can cause a memory leak. "
|
|
"We recommend using autograd.grad when creating the graph to avoid this. "
|
|
"If you have to use this function, make sure to reset the .grad fields of "
|
|
"your parameters to None after use to break the cycle and avoid the leak.");
|
|
}
|
|
|
|
// accumulate_grad is true if and only if the frontend call was to
|
|
// grad(), not backward(). grad() returns the sum of the gradients
|
|
// w.r.t. the inputs and thus needs the inputs to be present.
|
|
TORCH_CHECK_VALUE(
|
|
accumulate_grad || !outputs.empty(), "grad requires non-empty inputs.");
|
|
|
|
// A fresh first time Engine::execute call should start on the CPU device,
|
|
// initialize a new thread local ready queue on CPU or reuse the existing one
|
|
// (if there is one allocated already, i.e. consecutive backward calls,
|
|
// re-entrant backward calls), then memoize the local_ready_queue in GraphTask
|
|
init_local_ready_queue();
|
|
bool not_reentrant_backward_call = worker_device == NO_DEVICE;
|
|
|
|
auto graph_task = std::make_shared<GraphTask>(
|
|
/* keep_graph */ keep_graph,
|
|
/* create_graph */ create_graph,
|
|
/* depth */ not_reentrant_backward_call ? 0 : total_depth + 1,
|
|
/* cpu_ready_queue */ local_ready_queue);
|
|
|
|
// If we receive a single root, skip creating extra root node
|
|
bool skip_dummy_node = roots.size() == 1;
|
|
auto graph_root = skip_dummy_node
|
|
? roots.at(0).function
|
|
: std::make_shared<GraphRoot>(roots, inputs);
|
|
|
|
auto min_topo_nr = compute_min_topological_nr(outputs);
|
|
// Now compute the dependencies for all executable functions
|
|
compute_dependencies(graph_root.get(), *graph_task, min_topo_nr);
|
|
|
|
if (!outputs.empty()) {
|
|
graph_task->init_to_execute(
|
|
*graph_root, outputs, accumulate_grad, min_topo_nr);
|
|
}
|
|
|
|
// Queue the root
|
|
if (skip_dummy_node) {
|
|
InputBuffer input_buffer(roots.at(0).function->num_inputs());
|
|
auto input = inputs.at(0);
|
|
|
|
const auto input_stream = InputMetadata(input).stream();
|
|
const auto opt_next_stream =
|
|
roots.at(0).function->stream(c10::DeviceType::CUDA);
|
|
input_buffer.add(
|
|
roots.at(0).input_nr, std::move(input), input_stream, opt_next_stream);
|
|
|
|
execute_with_graph_task(graph_task, graph_root, std::move(input_buffer));
|
|
} else {
|
|
execute_with_graph_task(
|
|
graph_task, graph_root, InputBuffer(variable_list()));
|
|
}
|
|
// Avoid a refcount bump for the Future, since we check for refcount in
|
|
// DistEngine (see TORCH_INTERNAL_ASSERT(futureGrads.use_count() == 1)
|
|
// in dist_engine.cpp).
|
|
auto& fut = graph_task->future_result_;
|
|
fut->wait();
|
|
graph_task->warning_handler_.replay_warnings();
|
|
return fut->value().toTensorVector();
|
|
}
|
|
|
|
void Engine::initialize_device_threads_pool() {
|
|
TORCH_CHECK(
|
|
!in_bad_autograd_fork,
|
|
"Unable to handle autograd's threading in combination with fork-based multiprocessing. "
|
|
"See https://github.com/pytorch/pytorch/wiki/Autograd-and-Fork");
|
|
c10::call_once(
|
|
start_device_threads_flag_, &Engine::start_device_threads, this);
|
|
}
|
|
|
|
c10::intrusive_ptr<at::ivalue::Future> Engine::execute_with_graph_task(
|
|
const std::shared_ptr<GraphTask>& graph_task,
|
|
std::shared_ptr<Node> graph_root,
|
|
InputBuffer&& input_buffer) {
|
|
initialize_device_threads_pool();
|
|
// Lock mutex for GraphTask.
|
|
std::unique_lock<std::mutex> lock(graph_task->mutex_);
|
|
|
|
auto queue = ready_queue(graph_task->cpu_ready_queue_, input_buffer.device());
|
|
|
|
// worker_device == NO_DEVICE it's a CPU thread and it's trying to drive the
|
|
// autograd engine with corresponding GraphTask, and its NOT a re-entrant call
|
|
if (worker_device == NO_DEVICE) {
|
|
// We set the worker_device to CPU_DEVICE only if worker_device was
|
|
// previously NO_DEVICE. Setting it to CPU afterwards allow us to detect
|
|
// whether this is a re-entrant call or not.
|
|
set_device(CPU_DEVICE);
|
|
|
|
// set the graph_task owner to the current device
|
|
graph_task->owner_ = worker_device;
|
|
|
|
// Now that all the non-thread safe fields of the graph_task have been
|
|
// populated, we can enqueue it.
|
|
queue->push(
|
|
NodeTask(graph_task, std::move(graph_root), std::move(input_buffer)));
|
|
|
|
// The owning thread start to drive the engine execution for any CPU task
|
|
// that was just pushed or will be added later from other worker threads
|
|
lock.unlock();
|
|
thread_main(graph_task);
|
|
TORCH_INTERNAL_ASSERT(graph_task->future_result_->completed());
|
|
// reset the worker_device after the completion of the graph_task, this is
|
|
// so that the initial state of the engine remains the same across every
|
|
// backward() or grad() call, we don't need to reset local_ready_queue as we
|
|
// could possibly reuse it for new backward calls.
|
|
worker_device = NO_DEVICE;
|
|
} else {
|
|
// If worker_device is any devices (i.e. CPU, CUDA): this is a re-entrant
|
|
// backward call from that device.
|
|
graph_task->owner_ = worker_device;
|
|
|
|
// Now that all the non-thread safe fields of the graph_task have been
|
|
// populated, we can enqueue it.
|
|
queue->push(
|
|
NodeTask(graph_task, std::move(graph_root), std::move(input_buffer)));
|
|
|
|
if (current_depth >= max_recursion_depth_) {
|
|
// See Note [Reentrant backwards]
|
|
// If reached the max depth, switch to a different thread
|
|
add_thread_pool_task(graph_task);
|
|
} else {
|
|
// Total depth needs to be updated only in this codepath, since it is
|
|
// not used in the block above (when we call add_thread_pool_task).
|
|
// In the codepath above, GraphTask.reentrant_depth_ is used to
|
|
// bootstrap total_depth in the other thread.
|
|
++total_depth;
|
|
|
|
// Get back to work while we wait for our new graph_task to
|
|
// complete!
|
|
++current_depth;
|
|
lock.unlock();
|
|
thread_main(graph_task);
|
|
--current_depth;
|
|
--total_depth;
|
|
|
|
// The graph task should have completed and the associated future should
|
|
// be marked completed as well since 'thread_main' above is a call
|
|
// blocking an autograd engine thread.
|
|
TORCH_INTERNAL_ASSERT(graph_task->future_result_->completed());
|
|
}
|
|
}
|
|
// graph_task_exec_post_processing is done when the Future is marked as
|
|
// completed in mark_as_completed_and_run_post_processing.
|
|
return graph_task->future_result_;
|
|
}
|
|
|
|
// note that when python is present, this base engine will be overriden
|
|
// with a PythonEngine. Because this typically happens before get_default_engine
|
|
// is called, this base engine will never be created.
|
|
Engine& Engine::get_base_engine() {
|
|
static Engine engine;
|
|
return engine;
|
|
}
|
|
|
|
std::atomic<EngineStub> engine_stub(Engine::get_base_engine);
|
|
|
|
void set_default_engine_stub(EngineStub stub) {
|
|
engine_stub.store(stub);
|
|
}
|
|
|
|
Engine& Engine::get_default_engine() {
|
|
return engine_stub.load()();
|
|
}
|
|
|
|
void Engine::queue_callback(std::function<void()> callback) {
|
|
TORCH_CHECK(
|
|
current_graph_task,
|
|
"Final callbacks can only be installed during backward pass.");
|
|
|
|
std::lock_guard<std::mutex> lock(current_graph_task->final_callbacks_lock_);
|
|
current_graph_task->final_callbacks_.emplace_back(std::move(callback));
|
|
}
|
|
|
|
bool Engine::is_checkpoint_valid() {
|
|
return checkpoint_valid;
|
|
}
|
|
|
|
void Engine::init_local_ready_queue(std::shared_ptr<ReadyQueue> ready_queue) {
|
|
if (ready_queue) {
|
|
// if ready_queue provided in the caller, use the caller's ready_queue to
|
|
// initialize local_ready_queue
|
|
local_ready_queue = std::move(ready_queue);
|
|
} else if (!local_ready_queue) {
|
|
// otherwise if local_ready_queue not allocated, allocate a new ready_queue
|
|
local_ready_queue = std::make_shared<ReadyQueue>();
|
|
}
|
|
}
|
|
|
|
// CPU ready queue is per GraphTask, but CUDA device ready queues are shared
|
|
// across all graph tasks
|
|
auto Engine::ready_queue(
|
|
std::shared_ptr<ReadyQueue> cpu_ready_queue,
|
|
at::Device device) -> std::shared_ptr<ReadyQueue> {
|
|
if (should_run_in_cpu_ready_queue(device.type())) {
|
|
// return the cpu ready queue passed in
|
|
TORCH_INTERNAL_ASSERT(cpu_ready_queue);
|
|
return cpu_ready_queue;
|
|
} else {
|
|
TORCH_INTERNAL_ASSERT(
|
|
0 <= device.index() &&
|
|
device.index() <
|
|
static_cast<c10::DeviceIndex>(device_ready_queues_.size()));
|
|
// See Note [Allocating GPUs to autograd threads]
|
|
return device_ready_queues_.at(device.index());
|
|
}
|
|
}
|
|
|
|
auto Engine::ready_queue_by_index(
|
|
std::shared_ptr<ReadyQueue> cpu_ready_queue,
|
|
int device_index) -> std::shared_ptr<ReadyQueue> {
|
|
if (device_index == CPU_DEVICE) {
|
|
// return the cpu ready queue passed in
|
|
TORCH_INTERNAL_ASSERT(cpu_ready_queue);
|
|
return cpu_ready_queue;
|
|
} else {
|
|
TORCH_INTERNAL_ASSERT(
|
|
0 <= device_index &&
|
|
device_index <
|
|
static_cast<c10::DeviceIndex>(device_ready_queues_.size()));
|
|
// See Note [Allocating GPUs to autograd threads]
|
|
// NB: This function would become obsolete if we truly allocated a CPU
|
|
// thread per device, rather than colocate.
|
|
return device_ready_queues_.at(device_index);
|
|
}
|
|
}
|
|
|
|
auto Engine::start_device_threads() -> void {
|
|
// First always initialize the thread pool for re-entrant threads
|
|
thread_pool_shared_ = std::make_shared<ThreadPoolShared>();
|
|
|
|
// Second, create special threads for each non-CPU device
|
|
// See Note [Allocating GPUs to autograd threads]
|
|
c10::DeviceIndex num_devices = 0;
|
|
for (const auto& impl_atomic : c10::impl::device_guard_impl_registry) {
|
|
auto* impl = impl_atomic.load();
|
|
// Only record the number of devices for device that don't run on the
|
|
// cpu ready queue.
|
|
if (impl && !should_run_in_cpu_ready_queue(impl->type())) {
|
|
num_devices = std::max(num_devices, impl->deviceCount());
|
|
}
|
|
}
|
|
|
|
// If there are no device except cpu, no need to create worker threads
|
|
if (num_devices == 0) {
|
|
return;
|
|
}
|
|
|
|
// Since we're about to create threads, forking is not possible anymore
|
|
track_bad_autograd_forks();
|
|
|
|
// allocate one thread for every GPU device (but colocate GPUs of different
|
|
// types), and pre-allocate the device_ready_queues_ to ensure safe reading on
|
|
// it.
|
|
device_ready_queues_ = std::vector<std::shared_ptr<ReadyQueue>>(num_devices);
|
|
for (auto& queue : device_ready_queues_) {
|
|
queue = std::make_shared<ReadyQueue>();
|
|
}
|
|
|
|
for (const auto i : c10::irange(num_devices)) {
|
|
std::thread t(&Engine::thread_init, this, i, device_ready_queues_[i], true);
|
|
t.detach();
|
|
}
|
|
// Wait for the threads to start
|
|
{
|
|
std::unique_lock<std::mutex> lk(non_reentrant_device_thread_mutex_);
|
|
while (non_reentrant_device_thread_count_.load() !=
|
|
static_cast<uint32_t>(num_devices)) {
|
|
non_reentrant_device_thread_condvar_.wait(lk);
|
|
}
|
|
}
|
|
}
|
|
|
|
void Engine::add_thread_pool_task(const std::weak_ptr<GraphTask>& graph_task) {
|
|
std::unique_lock<std::mutex> lck(thread_pool_shared_->mutex_);
|
|
// There may already be some items on the graphtasks_queue_ added by other
|
|
// threads but not enough workers to get to the new task that will be
|
|
// added
|
|
bool create_thread =
|
|
(thread_pool_shared_->num_workers_ <=
|
|
thread_pool_shared_->graphtasks_queue_.size());
|
|
thread_pool_shared_->graphtasks_queue_.push(graph_task);
|
|
// Don't need to be holding the lock while actually creating the thread
|
|
lck.unlock();
|
|
if (create_thread) {
|
|
// If we're creating a new thread, forking is not allowed anymore
|
|
track_bad_autograd_forks();
|
|
std::thread t(&Engine::reentrant_thread_init, this);
|
|
t.detach();
|
|
}
|
|
// This works even if new thread is created because wait() will test the
|
|
// predicate before waiting
|
|
thread_pool_shared_->work_.notify_one();
|
|
}
|
|
|
|
// Remembers current streams on all devices where a context has been created.
|
|
// Only called if Engine::execute detects at least one node runs on a cuda
|
|
// stream.
|
|
void GraphTask::stash_current_streams() {
|
|
const auto guard = c10::impl::VirtualGuardImpl{c10::DeviceType::CUDA};
|
|
auto num_gpus = guard.deviceCount();
|
|
caller_current_streams_.resize(num_gpus);
|
|
if (num_gpus > 0) {
|
|
for (c10::DeviceIndex idx = 0; idx < num_gpus; idx++) {
|
|
#if defined(USE_ROCM) && (ROCM_VERSION < 50000)
|
|
// If the build targets ROCM, stash streams for all visible devices
|
|
// unconditionally, to work around
|
|
// https://github.com/pytorch/pytorch/issues/59750.
|
|
// TODO: Remove ROCM-specific behavior when
|
|
// https://github.com/pytorch/pytorch/issues/59750 is fixed.
|
|
if (true) {
|
|
#else
|
|
if (at::detail::getCUDAHooks().hasPrimaryContext(idx)) {
|
|
#endif
|
|
caller_current_streams_[idx] =
|
|
guard.getStream({c10::DeviceType::CUDA, idx});
|
|
} else {
|
|
caller_current_streams_[idx] = c10::nullopt;
|
|
}
|
|
}
|
|
}
|
|
}
|
|
|
|
void GraphTask::init_to_execute(
|
|
Node& graph_root,
|
|
const edge_list& outputs,
|
|
bool accumulate_grad,
|
|
uint64_t min_topo_nr) {
|
|
// Populates exec_info so nodes that should be executed have
|
|
// `exec_info[node].needed_ = true` Only nodes that have a path to any edge in
|
|
// `outputs` should be executed. The code below populates exec_info using
|
|
// recursion, but the actual code does this iteratively. Refer to the
|
|
// numbering to see how the actual code corresponds. A difference to note is
|
|
// that in the iterative version, when you are working with the current Node,
|
|
// you are reponsible to update your parent's is_needed after all your
|
|
// children have been updated.
|
|
//
|
|
// is_needed = {fn: True for fn in outputs} # (0)
|
|
// seen = {}
|
|
// def compute_is_needed(fn):
|
|
// for next_edge in fn.next_edges:
|
|
// child_fn = next_edge.fn
|
|
// if child_fn in seen and is_needed[child_fn]: # (1)
|
|
// is_needed[fn] = true
|
|
// else:
|
|
// seen.add(child_fn)
|
|
// if compute_is_needed(child_fn):
|
|
// is_needed[fn] = true # (2)
|
|
// # (3) exit for-loop
|
|
// return is_needed[fn]
|
|
// compute_is_needed(graph_root)
|
|
//
|
|
// NB: you might be wondering why we don't populate `seen` with outputs. We
|
|
// cannot because in the case where two outputs lie on the same path, we still
|
|
// need to explore past the first output or we would miss the nodes that are
|
|
// required to compute the second output.
|
|
int output_idx = 0;
|
|
for (auto& output_edge : outputs) {
|
|
// (0) `is_needed` above corresponds to `exec_info_[fn].needed_`
|
|
Node* output = output_edge.function.get();
|
|
auto& info = exec_info_[output];
|
|
if (accumulate_grad) {
|
|
// if called through `.backward()` we directly set `needed_` for all the
|
|
// outputs to true
|
|
info.needed_ = true;
|
|
} else {
|
|
// otherwise it is `.grad()` and we set exec_info[fn].captures_ instead
|
|
// In terms of populating the rest of exec_info though, you can basically
|
|
// think of this as the same as setting `needed_` is true directly.
|
|
if (!info.captures_) {
|
|
info.captures_ = make_unique<std::vector<ExecInfo::Capture>>();
|
|
}
|
|
info.captures_->emplace_back(output_edge.input_nr, output_idx++);
|
|
}
|
|
}
|
|
captured_vars_.resize(output_idx);
|
|
|
|
struct Frame {
|
|
Frame(Node* fn) : fn_(fn), next_next_fn_(0) {}
|
|
Node* fn_;
|
|
size_t next_next_fn_;
|
|
|
|
Node* get_next_fn() {
|
|
const auto& next = fn_->next_edges();
|
|
auto num_next = next.size();
|
|
while (next_next_fn_ < num_next) {
|
|
auto fn = next[next_next_fn_++].function.get();
|
|
if (fn)
|
|
return fn;
|
|
}
|
|
return nullptr;
|
|
}
|
|
};
|
|
|
|
auto nodeShouldExecute = [this](Node* fn) {
|
|
auto it = exec_info_.find(fn);
|
|
return it != exec_info_.end() && it->second.should_execute();
|
|
};
|
|
|
|
std::vector<Frame> stack;
|
|
std::unordered_set<Node*> seen;
|
|
stack.emplace_back(&graph_root);
|
|
exec_info_.emplace(stack.back().fn_, ExecInfo());
|
|
|
|
while (!stack.empty()) {
|
|
auto& frame = stack.back();
|
|
const auto fn = frame.fn_;
|
|
|
|
Node* child_fn = nullptr;
|
|
while ((child_fn = frame.get_next_fn()) && !seen.emplace(child_fn).second) {
|
|
// (1) next child exists AND has already been seen
|
|
if (nodeShouldExecute(child_fn)) {
|
|
exec_info_[fn].needed_ = true;
|
|
}
|
|
}
|
|
|
|
if (child_fn) {
|
|
// (2) next child exists but has not been seen
|
|
if (child_fn->topological_nr() < min_topo_nr) {
|
|
// child created before the first output means this child cannot have
|
|
// an edge to output
|
|
continue;
|
|
}
|
|
stack.emplace_back(child_fn);
|
|
} else {
|
|
// (3) no next child exists for `fn` means its `needed` has already been
|
|
// finalized. pop stack and update parent
|
|
stack.pop_back();
|
|
if (nodeShouldExecute(fn) && !stack.empty()) {
|
|
exec_info_[stack.back().fn_].needed_ = true;
|
|
}
|
|
}
|
|
}
|
|
}
|
|
|
|
} // namespace autograd
|
|
} // namespace torch
|