Today, we always create and record an events in two places:
1) Upon seeing the first producer, we record an event on the producer, and we wait for this event in two places: (1) when the engine goes to run the consumer, the consumer stream waits for this event. (2) prior to doing accumulation, the accumulation stream waits for this event.
2) After doing accumulation, we record an event on the accumulation stream and wait for this event in a single place: when the engine goes to run the consumer.
We do not actually need to record the event in the cases where the 1st producer stream is the same as the consumer and as the accumulation stream, and where the accumulation stream is the same as the consumer stream.
Removing this unnecessary create + record event should save a few us for each instance avoided.
Fixes https://github.com/pytorch/pytorch/issues/157407
----
Manual test plan:
- [x] @eqy to confirm perf is restored
- [x] Running the repro originally reported before/after the patch
Pull Request resolved: https://github.com/pytorch/pytorch/pull/157503
Approved by: https://github.com/eqy
ghstack dependencies: #155715
Thanks @awgu for raising this issue and the small repro
From offline discussion with @albanD, in the case where a forward returns multiple outputs with different devices, we'd want to select the ready queue based on the device of the first one. Even though this is somewhat arbitrary, we prefer this over deciding which ready queue to push based on whichever input buffer's we happen to compute last, which can vary depending on more factors and thus be harder to reason about. This is in theory bc-breaking, but it seems unlikely that someone would depend on this behavior.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/135633
Approved by: https://github.com/albanD
In this stack of PRs we adding caching to output tensors for cudagraph trees after we've done initial recording. On initial recording we do not cache tensor outputs because this prevents memory from being reclaimed. On subsequent exeuctions we do cache them to avoid overhead. However, because there is an extra reference around, this caused divergent recording & execution behavior in both autocast caching and autograd gradient stealing. Divergent recording & execution would keep on re-recording and eventually stabilize, but it's not what you want to see happen.
This pr makes the autocast cache and buffer stealing aware of the cudagraph static output tensors.
I will add this to the other cudagraph impl in another pr.
Not sure if this should be in autograd or in autocast since it affects both.. Or somewhere else
Pull Request resolved: https://github.com/pytorch/pytorch/pull/99368
Approved by: https://github.com/albanD, https://github.com/ezyang
Fixes internal linking problem after `DECLARE_DISPATCH` was introduced in SparseTensorUtils.cpp, but implemented inside the native library.
Also, fix `sign-unsigned` compare in `_flatten_indices_impl`
Followups:
Move code declared/implemented in `SparseTensorUtils.*` to `at::native` namespace
Pull Request resolved: https://github.com/pytorch/pytorch/pull/96696
Approved by: https://github.com/albanD
We have an older torch.vmap implementation. It is no longer supported.
It still needs to exist somewhere for the sake of BC with
torch.autograd.functional.
This PR makes it clear what files are meant for implementing the old
vmap implementation. I've seen a couple of PRs recently adding support
for the old vmap implementation, so this will lessen the confusion.
Test Plan:
- CI
Pull Request resolved: https://github.com/pytorch/pytorch/pull/90324
Approved by: https://github.com/samdow
There is a fast path in InputBuffer to steal memory when use count is zero, however it is only used for sparse Tensors. According to Natalia, this is just because it wasn't obvious that there would be a benefit for dense Tensors so there was no reason to live dangerously. However I've noticed large Tensors in internal models which would benefit from this optimization as well.
Differential Revision: [D40946601](https://our.internmc.facebook.com/intern/diff/D40946601/)
Pull Request resolved: https://github.com/pytorch/pytorch/pull/88339
Approved by: https://github.com/ngimel
### Introduction
<!-- What did you change and why was it needed? -->
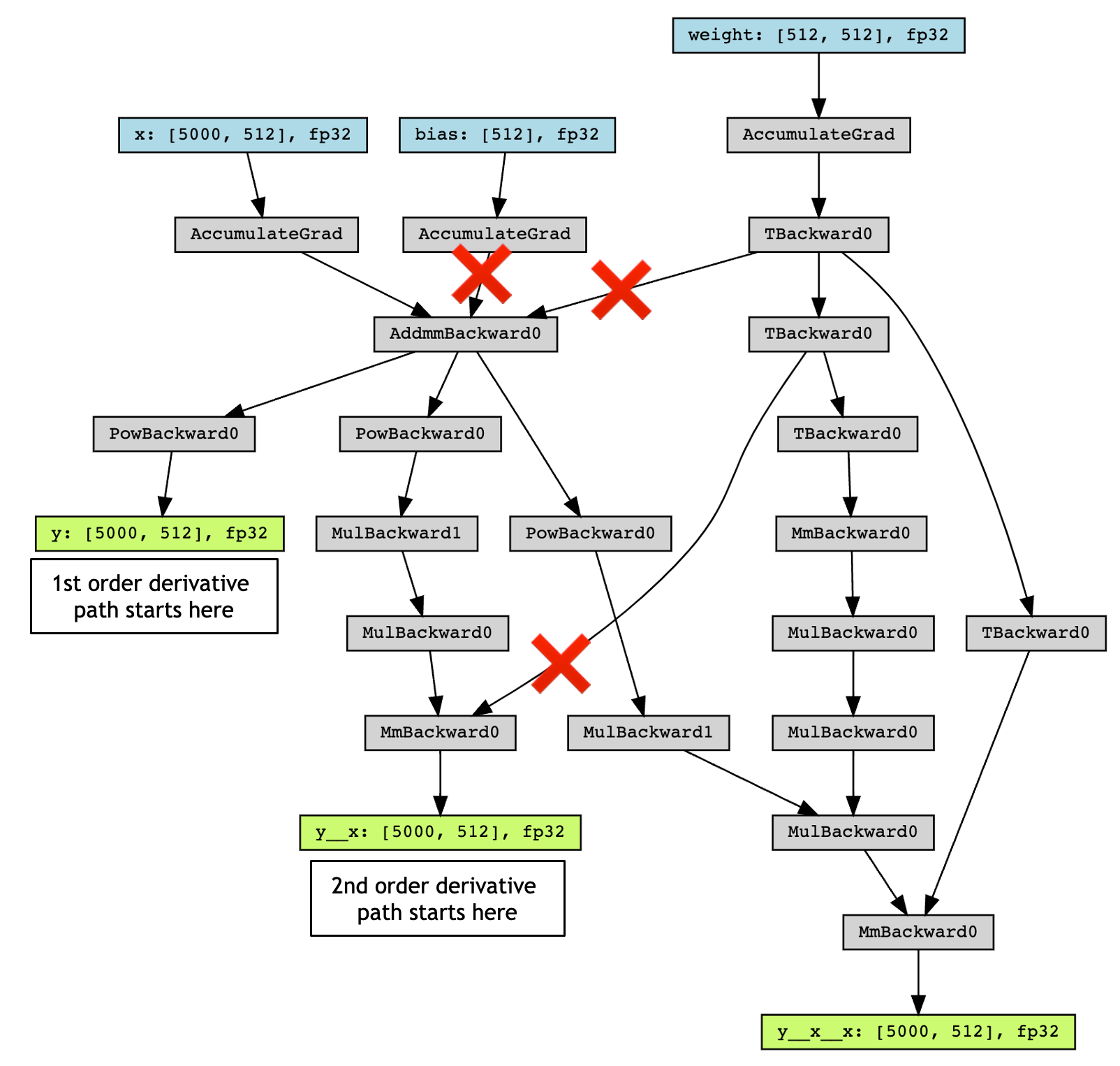
Removing unnecessary weight gradient calculation is very important for applications that need high-order derivatives during training. However, this is not supported by the current Autograd engine.
For more detail: The backward function of a `matmul` operator (e.g., `linear` `addmm` `mm`), has two matmuls, one for `input gradient` and another for `weight gradient`. For a typical neural network (nn) with a few linear layers and activation functions, if the user calls `torch.autograd.grad()` to calculate the derivative of the nn output `y` w.r.t the nn input `x`, only the `input gradient` of the `matmul` operator is needed, and the `weight gradient` is discarded. However, the current PyTorch autograd engine will always calculate the `weight gradient` if `weight` requires gradient (the calculation of the high-order derivative is performed during training).
The figure attached shows the autograd graph of the following code snippet:
```py
y = torch.nn.functional.linear(x, weight, bias)
y = y.pow(2)
# first order derivative
y__x, = torch.autograd.grad(y, x, grad_outputs=grad_outputs, create_graph=True)
# first order derivative
y__x__x, = torch.autograd.grad(y__x, x, grad_outputs=grad_outputs, create_graph=True)
```
The path with ❌ is not needed when calculating derivatives.
<img width="50%" alt="image" src="https://user-images.githubusercontent.com/9999318/182018117-719c5a23-bcc6-4a63-8e8d-1bca3ebda2e3.png">
### Issue
<!-- Link to Issue ticket or RFP -->
Related issue: https://github.com/pytorch/pytorch/issues/56500
### Method
When calling `torch.autograd.grad`, `exec_info_` is created for each GraphTask, which allows filtering paths on the graph that are not needed. However, when the GraphTask calls into the node, the node still does not know whether the edges are needed or not. In the case of matmul, `weight.requires_grad is True` so the weight gradient is always calculated.
Following https://github.com/pytorch/pytorch/issues/56500#issuecomment-825694656, this PR passes the graph task's thread_local `exec_info_` into the node, so it could trim unnecessary edges during `torch.autograd.grad` calls.
### Benchmark
Benchmark script: https://gist.github.com/yueyericardo/24158433a2021c51eeef9c3e2722df99
Benchmark result:
6 hidden layers, batch size 10000, on A100
FP32 result
| hessian benchmark | FP32 (before) | FP32 (After) | FP32 (Functorch v0.1.1) |
| ----------------------------- | ------------- | ----------------- | ----------------------- |
| Linear + ReLU (no backward) | 55.658 ms | 29.392 ms (1.90X) | 29.547 ms (1.90X) |
| Linear + ReLU (with backward) | 81.173 ms | 54.917 ms (1.47X) | 68.988 ms (1.18X) |
TF32 result
| hessian benchmark | TF32 (before) | TF32 (after) | TF32 (Functorch v0.1.1) |
| ----------------------------- | ------------- | ----------------- | ----------------------- |
| Linear + ReLU (no backward) | 19.801 ms | 11.259 ms (1.76X) | 10.754 ms (1.84X) |
| Linear + ReLU (with backward) | 29.167 ms | 20.466 ms (1.42X) | 22.784 ms (1.28X) |
For FP32 result, we could get 1.9X speed up for hessian calculation, and 1.47X speed up during training, which is even faster than functorch `vmap(jacfwd(jacrev` implementation. (functorch has performance regression on v0.2.0, https://github.com/pytorch/functorch/issues/989, so we are using v0.1.1 for benchmark)
@zou3519 does functorch also includes similar optimizations during hessian calculation? If not, what do we need to do so the functorch could also benefit from this PR?
### Testing
<!-- How did you test your change? -->
- [x] we need to figure out a way for unittest
### Thanks
Thanks for the great blog: [How Computational Graphs are Executed in PyTorch | PyTorch](https://pytorch.org/blog/how-computational-graphs-are-executed-in-pytorch/)
cc @zasdfgbnm @albanD
Pull Request resolved: https://github.com/pytorch/pytorch/pull/82544
Approved by: https://github.com/soulitzer
Summary:
Fixes https://github.com/pytorch/pytorch/issues/33909.
I _think_ the two recordDataPtrOnStreams i added are necessary and sufficient. They're the ones that worked for dmitrivainbrand's intricate multistream pipelining in https://github.com/pytorch/pytorch/issues/33909 and I can more or less convince myself they're enough, but it's hard to be sure (and hard to test).
PRing without a test now for visibility. I'll try to come up with something.
input_buffer.cpp needs to compile in cuda or cpu-only builds, so I can't call `c10::cuda::CUDACachingAllocator::recordStream` directly. I planned to work around by adding a binding in VirtualGuardImpl but https://github.com/pytorch/pytorch/pull/57047 spared me the trouble, thanks lw .
Recording a usage stream on a generic tensor was uglier than I expected, see https://github.com/pytorch/pytorch/issues/60306. Up to you guys if adding a unified way to record streams on a tensor backed by any TensorImpl should block this PR (and if so, whether it should happen in a separate PR or as part of this PR).
Pull Request resolved: https://github.com/pytorch/pytorch/pull/60230
Reviewed By: mrshenli
Differential Revision: D29289392
Pulled By: albanD
fbshipit-source-id: 1339d382b7d238a461b082597b3962847b5201fe
Summary:
Pull Request resolved: https://github.com/pytorch/pytorch/pull/33157
This PR enables graph level thread parallelism on CPU for the Autograd
Engine. It replace https://github.com/pytorch/pytorch/pull/29574 for the
reason of task level parallelism drawbacks with the existing autograd
system.
Fixes https://github.com/pytorch/pytorch/issues/18333
The graph level parallelism on CPU design:
1. Remove the single CPU thread that init in the Engine itself and allow
the owning thread (which calls Engine::execute) to drive the Engine
execution so that we could let outer threading to enable thread
parallelism.
2. Maintain a separate ReadyQueue per CPU thread, and stash the
ReadyQueue for different devices/threads into the thread local
shared_ptr, the Engine itself will memorize the shared_ptr of the
ReadyQueue to different devices (other than CPU)
3. The CPU thread local ReadyQueue is initialized per CPU thread
Engine::execute call (or `backward()`, `grad()` call), and memorized
the shared_ptr into the GraphTask since every `backward()` call have
its own GraphTask
4. Cross device NodeTask push is accomplished by 2 and 3. we can refer
to device's ReadyQueue from Engine, and CPU's ReadyQueue from
GraphTask, which means if we can push to a different ReadyQueue
according to the device
5. Termination of the CPU thread: if we mark the graph_task as
completed, we will exit the while loop and terminate the current
backward execution, because it's guranteed that all other NodeTasks
is finished before we mark a GraphTask as complete
6. re-entrant thread logic keeps the same, reentrant thread detection is
similar as before, we set the worker_device to NO_DEVICE initially
and set to CPU afterward to detect if this is a reentrant call or not.
7. we still have the reentrant thread pool that create new threads if it's
a deep reentrant case, and reuse the ReadyQueue with the parent thread
for performance.
Since we introduce the thread parallelism on CPU, we have to ensure the
thread safety of the GraphTask. This is not a problem if we execute all
forward in different threads since we will build separate GraphTask in
different threads, and each GraphTask is a separate instance that share
nothing, i.e. Hogwild training on CPU should be fine on this case.
But there might be case that user would like to do some part of the task in
a single thread, and do the rest of work in several threads
concurrently, so thread safety is crucial in those cases. The thread
safety strategy for the multithread autograd is as follows:
1. Add a mutex to protect thread safety in Autograd Node/Function, and
hold the lock for different data racing cases
2. Lock the mutex during Node::apply(), this is to ensure Node that
writing to the shared variable are not racing across threads (i.e.
AccumulateGrad and custom C++ Autograd Node if writing to shared
variables )
3. Lock the mutex during Node::release_variables(), this serve the
purpose that when we release saved_variables from one thread, no
other threads can call the Node::apply(), this ensures the variable
references from other threads aren't dangling.
4. If we don't release any variables and no shared data read/write in
the Node i.e. purely functional, we don't lock the mutex
This way we could protect the thread safety on Autograd Node, but we
could still not protect the thread safety on Node pre/post C++ hooks
(python hooks are automatically thread safe), we rely on the user to
write thread safe C++ hooks if they want the hook to be correctly
applied in multithreading environment.
**User visiable changes**:
There're not too much user visiable changes, since we use the owning
thread to drive the autograd execution, user could write their own
threading code and does not block on the Autograd engine, some behaviors
that user should be aware of:
**Non-determinism**:
if we are calling backward() on multiple thread concurrently but with
shared inputs (i.e. Hogwild CPU training). Since parameters are automatically shared across threads, gradient accumulation might become non-deterministic on backward calls across threads, because two backward calls might access and try to accumulate the same .grad attribute. This is technically not safe, and it might result in racing condition and the result might be invalid to use.
But this is expected pattern if user are using the multithreading
approach to drive the whole training process but using shared
parameters, user who use multithreading should have the threading model
in mind and should expect this to happen. User should use the functional
interface `torch.autograd.grad()` to calculate the gradients instead of
`backward()` on loss.
**Graph retaining**:
If part of the autograd graph is shared between threads, i.e. run first
part of forward single thread, then run second part in multiple threads,
then the first part of graph is shared. In this case different threads execute grad() or backward() on the same graph might
have issue of destroying the graph on the fly of one thread, and the
other thread will crash in this case. We will error out to the user
similar to what call `backward()` twice with out `retain_graph=True`, and let the user know they should use `retain_graph=True`.
**TODOs**:
[ ] benchmark the PR with example models and datasets to demonstrate
the performance gain in CPU training
[ ] ensure that we don't regress the single thread autograd performance
**Follow ups**:
[ ] a correct and tight integration with distributed autograd
[ ] try to unify the thread pool between JIT and Autograd, and see if
there's unifying pattern that we could apply universally
Test Plan: Imported from OSS
Differential Revision: D20236771
Pulled By: wanchaol
fbshipit-source-id: 1e0bd4eec14ffebeffdb60b763b8d6f0e427eb64
Summary:
While putting finishing touches on the gradient scaling PR (https://github.com/pytorch/pytorch/pull/26512), I discovered my multi-GPU test (which uses `to()` to transfer tensors between devices) was intermittently failing with bad numerics. I knew it was going to be [a weird case from the start](https://www.imdb.com/title/tt8946378/quotes/qt4868203) and spent a week descending into madness. It turns out, for backward ops that create gradients on a different device from the device on whose stream the op is executed, the streaming backward synchronizations in [input_buffer.cpp](https://github.com/pytorch/pytorch/blob/master/torch/csrc/autograd/input_buffer.cpp#L46-L83) do not properly tell later ops to wait on the population/creation of those gradients. For example, a cross-device `to()` backward (CopyBackward Node) enqueues a cudaMemcpyAsync on the current stream of the source (incoming gradient's) device, then [syncs getCurrentCUDAStream on the destination device with the cudaMemcpyAsync](https://github.com/pytorch/pytorch/blob/master/aten/src/ATen/native/cuda/Copy.cu#L76). However, `input_buffer.cpp` in such cases ([case (3)](https://github.com/pytorch/pytorch/blob/master/torch/csrc/autograd/input_buffer.cpp#L77-L81)) was not properly telling `opt_consumer_stream` to wait on the current stream of the destination device (`var`'s device).
Circumstances needed to repro in current master (see [my test](https://github.com/pytorch/pytorch/compare/master...mcarilli:backward_to_race_fix#diff-e68a7bc6ba14f212e5e7eb3727394b40R1901)):
- 2 devices, with non-default streams used for forward-pass ops on both devices (which is the default behavior in test_cuda.py)
- A `to()` that transfers a tensor requiring grad from one device to another
- A backward pass that routes back through to()'s backward (aka CopyBackward).
Under these circumstances, backward ops following CopyBackward on CopyBackward's destination device (aka the original forward-pass source device) race with the device-to-device transfer, and execute using partially-transferred data.
The present PR fixes the race condition and ensures that later ops wait on the CopyBackward transfer. This PR should also make streaming backward safe for other backward ops that span devices, as long as they play nice and populate any new gradients they create using the "current stream" of the device(s) on which they create those gradients.
There are a couple minor issues where I'm not sure of the best approach:
- Should we guard onto the var's device for the entire body of InputBuffer::add?
- I'm fairly sure we need to `recordStream` on `var` if the consumer stream is different from the stream on which (we expect) `var` was created, but calling `c10::cuda::CUDACachingAllocator::recordStream` in input_buffer.cpp might break CPU-only builds. I couldn't find a different API call to record streams that seemed CPU-build-agnostic. Could I wrap the call with a macro?
Thanks to mruberry for helpful suggestions and also the organization/naming of the stream pool and streaming backward code that allowed me to (just barely) wrap my head around the issue.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/31930
Differential Revision: D19517617
Pulled By: mruberry
fbshipit-source-id: 183d5460aefa5d27366b465b0473b80ec80fa044
Summary:
This PR addresses issue https://github.com/pytorch/pytorch/issues/7601.
Currently models that use streams explicitly in forward have to do a lot of extra work to make backwards respect those streams. This PR extends the (recently added) input tracing (see TypeAndShape) to record the devices and streams of inputs. The autograd engine then uses this metadata to enact the expected stream parallelism without extra work from the user.
For example, a model with forward declared like (original example courtesy of ngimel):
```
def forward(self,x):
x0 = x.clone()
torch._C._cuda_setStream(self.stream1._cdata)
y0 = self.fc1(x0)
self.event1.record(stream = torch.cuda.current_stream())
torch._C._cuda_setStream(self.stream2._cdata)
y1 = self.fc2(x)
self.event2.record(stream = torch.cuda.current_stream())
self.stream2.wait_event(self.event1)
return y0 + y1
```
currently will backward on a single stream. With this change the kernels will go on the streams they are assigned in forward and both forward and backward will (for appropriate sizes) run the fc1 and fc2 kernels simultaneously.
The crux of this change is, as mentioned, an expansion of the TypeAndShape tracing and a relatively simple change to the autograd engine to use cuda events for stream synchronization. To make this efficient I also added a new AutoGPUAndStream class, exposed getting and setting streams on devices, and removed InputBuffer's AutoGPU (it's now redundant). While making these modifications I also fixed AutoGPU to check before setting the GPU when it's destroyed and to use THCudaCheck instead of its custom error handler. These changes mean that an often excessive cudaSetDevice() is not being called when inputs are added to a buffer.
In addition to allowing users to easily set and use streams that are respected in both forward and backward, this change may encourage modules to do the same and the expanded tracing might allow further optimizations in the autograd engine. (apaszke, for example, now after initial enumeration we know the number of devices that will be used by a graph task, which might help provide a sense of the "level of parallelism" we should expect.)
Pull Request resolved: https://github.com/pytorch/pytorch/pull/8354
Test Plan: Two tests were added specifically for this behavior.
Differential Revision: D17275980
Pulled By: mruberry
fbshipit-source-id: 92bd50ac782ffa973b159fcbbadb7a083802e45d
Summary:
This PR allows `gather` to optionally return sparse gradients, as requested in #16329. It also allows to autograd engine to accumulate sparse gradients in place when it is safe to do so.
I've commented out size.size() check in `SparseTensor.cpp` that also caused #17152, it does not seem to me that check serves a useful purpose, but please correct me if I'm wrong and a better fix is required.
Motivating example:
For this commonly used label smoothing loss function
```
def label_smoothing_opt(x, target):
padding_idx = 0
smoothing = 0.1
logprobs = torch.nn.functional.log_softmax(x, dim=-1, dtype=torch.float32)
pad_mask = (target == padding_idx)
ll_loss = logprobs.gather(dim=-1, index=target.unsqueeze(1), sparse = True).squeeze(1)
smooth_loss = logprobs.mean(dim=-1)
loss = (smoothing - 1.0) * ll_loss - smoothing * smooth_loss
loss.masked_fill_(pad_mask, 0)
return loss.sum()
```
backward goes from 12.6 ms with dense gather gradients to 7.3 ms with sparse gradients, for 9K tokens x 30K vocab, which is some single percent end-to-end improvement, and also improvement in peak memory required.
Shout-out to core devs: adding python-exposed functions with keyword arguments through native_functions.yaml is very easy now!
cc gchanan apaszke
Pull Request resolved: https://github.com/pytorch/pytorch/pull/17182
Differential Revision: D14158431
Pulled By: gchanan
fbshipit-source-id: c8b654611534198025daaf7a634482b3151fbade
Summary:
Anywhere we used #include "foo.h", we now say #include <foo.h>
Paths are adjusted to be rooted out of aten/src, torch/lib, or
the root level directory.
I modified CMakeLists.txt by hand to remove TH and THC from
the include paths.
I used the following script to do the canonicalization:
```
import subprocess
import re
import os.path
files = subprocess.check_output(['git', 'ls-files']).decode('utf-8').rstrip().split('\n')
for fn in files:
if not any(fn.endswith(suff) for suff in ['.cu', '.cpp', '.in', '.h', '.hpp', '.cu', '.cuh', '.cc']):
continue
if not any(fn.startswith(pref) for pref in ["aten/", "torch/"]):
continue
with open(fn, 'r') as f:
c = f.read()
def fmt(p):
return "#include <{}>".format(p)
def repl(m):
p = m.group(1)
if p in ["dlfcn.h", "unistd.h", "nvrtc.h", "cuda.h", "cuda_runtime.h", "cstdint", "cudnn.h", "Python.h", "cusparse.h", "cuda_runtime_api.h", "cuda_fp16.h", "cublas_v2.h", "stdint.h", "curand_kernel.h"]:
return fmt(p)
if any(p.startswith(pref) for pref in ["torch/csrc", "c10/", "ATen/", "caffe2/", "TH/", "THC/", "Eigen/", "gtest/", "zdl/", "gloo/", "onnx/", "miopen/"]):
return fmt(p)
for root in ["aten/src", "torch/lib", ""]:
for bad_root in [os.path.dirname(fn), "aten/src/TH", "aten/src/THC", "torch/csrc"]:
new_p = os.path.relpath(os.path.join(bad_root, p), root)
if not new_p.startswith("../") and (os.path.exists(os.path.join(root, new_p)) or os.path.exists(os.path.join(root, new_p + ".in"))):
return fmt(new_p)
print("ERROR: ", fn, p)
return m.group(0)
new_c = re.sub(r'#include "([^"]+)"', repl, c)
if new_c != c:
print(fn)
with open(fn, 'w') as f:
f.write(new_c)
```
Signed-off-by: Edward Z. Yang <ezyang@fb.com>
Pull Request resolved: https://github.com/pytorch/pytorch/pull/14849
Reviewed By: dzhulgakov
Differential Revision: D13363445
Pulled By: ezyang
fbshipit-source-id: 52361f878a672785f9306c9e9ab2513128092b68
Summary:
Pull Request resolved: https://github.com/pytorch/pytorch/pull/13342
This PR introduces a few new concepts:
- DeviceGuardImplInterface, and implementations for CPU and CUDA, which
provide a generic interface for interfacing with device and stream state,
without requiring a direct dependency on the code in question.
- InlineDeviceGuard, a general template for generating both specialized
and dynamically dispatched device guard implementations. Dynamic
dispatch is done by specializing it on a VirtualGuardImpl.
- Provide a device-independent DeviceGuard class, which can be used even
from CPU code. It uses the aforementioned dynamic dispatch.
- CUDA-specialized CUDAGuard class, which doesn't have a dynamic dispatch
but can only be used from CUDA.
- StreamGuard, which is the same as above, but for streams rather than
devices.
- Optional variants of all the aforementioned guards, which are a no-op if
no device/stream is specified
- CUDAMultiStreamGuard, specifically for the case when we want to set
a device on every guard.
There are some subtle semantic changes, which have been thoroughly documented
in the class definition.
BC-breaking changes:
- Move constructor/assignment have been removed from all device guard
implementations.
- In some cases where you previously wrote 'set_device' (or 'set_stream'), you now must write
'reset_device', because if you switch devices/device types, the stream/device on the
previous device is unset. This is different from previous behavior.
- CUDAGuard no longer handles streams, or multiple streams. Use CUDAStreamGuard
or CUDAMultiStreamGuard as appropriate for your use case.
Reviewed By: dzhulgakov
Differential Revision: D12849620
fbshipit-source-id: f61956256f0b12be754b3234fcc73c2abc1be04e
Summary:
Followup to #12841
Changed these to not require type dispatch:
tensor.type().is_cuda() -> tensor.is_cuda()
tensor.type().is_sparse() -> tensor.is_sparse()
isVariable(tensor.type()) -> tensor.is_variable()
This probably does not affect performance
very much in most cases but it is nice to have.
Pull Request resolved: https://github.com/pytorch/pytorch/pull/13590
Reviewed By: ezyang
Differential Revision: D12929301
Pulled By: zou3519
fbshipit-source-id: 8ac5c6200c579dd7a44fb4ee58fc9bb170feb1d7
Summary:
I got some tensor->variable conversion exceptions from `torch/csrc/autograd/variable.h`, which used the `TORCH_ASSERTM` macros instead of `AT_CHECK`, so they didn't have backtraces. This was such a substantial loss for debugability that I decided to update the whole codebase to use the backtrace-enabled ATen macros instead of `TORCH_ASSERT` and `JIT_ASSERT`, the latter having been an alias of the former.
ezyang apaszke zdevito
Pull Request resolved: https://github.com/pytorch/pytorch/pull/9575
Differential Revision: D8924566
Pulled By: goldsborough
fbshipit-source-id: 7a4013b13eec9dbf024cef94cf49fca72f61d441
* Created TensorOptions
Storing the type in TensorOptions to solve the Variable problem
Created convenience creation functions for TensorOptions and added tests
Converted zeros to TensorOptions
Converted rand to TensorOptions
Fix codegen for TensorOptions and multiple arguments
Put TensorOptions convenience functions into torch namespace too
All factory functions except *_like support TensorOptions
Integrated with recent JIT changes
Support *_like functions
Fix in place modification
Some cleanups and fixes
Support sparse_coo_tensor
Fix bug in Type.cpp
Fix .empty calls in C++ API
Fix bug in Type.cpp
Trying to fix device placement
Make AutoGPU CPU compatible
Remove some auto_gpu.h uses
Fixing some headers
Fix some remaining CUDA/AutoGPU issues
Fix some AutoGPU uses
Fixes to dispatch_tensor_conversion
Reset version of new variables to zero
Implemented parsing device strings
Random fixes to tests
Self review cleanups
flake8
Undo changes to variable.{h,cpp} because they fail on gcc7.2
Add [cuda] tag to tensor_options_cuda.cpp
Move AutoGPU::set_index_from into .cpp file because Windows is stupid and sucks
Fix linker error in AutoGPU.cpp
Fix bad merge conflict in native_functions.yaml
Fixed caffe2/contrib/aten
Fix new window functions added to TensorFactories.cpp
* Removed torch::TensorOptions
Added code to generate wrapper functions for factory methods
Add implicit constructor from Backend to TensorOptions
Remove Var() from C++ API and use torch:: functions
Use torch:: functions more subtly in C++ API
Make AutoGPU::set_device more exception safe
Check status directly in DynamicCUDAHooksInterface
Rename AutoGPU to DeviceGuard
Removed set_requires_grad from python_variables.h and warn appropriately in Variable::set_requires_grad
remove python_default_init: self.type()
Add back original factory functions, but with deprecation warnings
Disable DeviceGuard for a couple functions in ATen
Remove print statement
Fix DeviceGuard construction from undefined tensor
Fixing CUDA device compiler issues
Moved as many methods as possible into header files
Dont generate python functions for deprecated factories
Remove merge conflict artefact
Fix tensor_options_cuda.cpp
Fix set_requires_grad not being checked
Fix tensor_new.h
TEMPORARILY put some methods in .cpp files to see if it solves issues on windows and mac
Fix bug in DeviceGuard.h
Missing includes
TEMPORARILY moving a few more methods into .cpp to see if it fixes windows
Fixing linker errors
* Fix up SummaryOps to use new factories
Undo device agnostic behavior of DeviceGuard
Use -1 instead of optional for default device index
Also move DeviceGuard methods into header
Fixes around device index after optional -> int32_t switch
Fix use of DeviceGuard in new_with_tensor_copy
Fix tensor_options.cpp
* Fix Type::copy(
* Remove test_non_float_params from ONNX tests
* Set requires_grad=False in ONNX tests that use ints
* Put layout/dtype/device on Tensor
* Post merge fixes
* Change behavior of DeviceGuard to match AutoGPU
* Fix C++ API integration tests
* Fix flip functions
{kind=link}